Sách trắng: Vectơ xác thực T7
Matthew C. Varley, Susanne Ellens, David Carey. Nhóm nghiên cứu thể thao, hiệu suất và dinh dưỡng, Trường Y tế liên quan, Dịch vụ nhân sinh và Thể thao, Đại học La Trobe, Melbourne, VIC, Úc.
1. GIỚI THIỆU
Hệ thống theo dõi vận động viên đã trở thành một công cụ thiết yếu cho thể thao. Các hệ thống này cho phép các học viên định lượng và phân tích chuyển động của vận động viên để hiểu rõ hơn về khối lượng luyện tập, hiệu suất thể chất, hành vi chiến thuật và rủi ro chấn thương. 1
Mặc dù có nhiều hệ thống theo dõi, nhưng hầu hết đều có hạn chế khi sử dụng trong nhà. Hệ thống định vị cục bộ ClearSky ( LPS ) là công nghệ cung cấp chức năng theo dõi và đo lường hiệu suất của vận động viên trong môi trường trong nhà. Cụ thể, hệ thống đưa ra các số liệu về vị trí và vị trí như khoảng cách, vận tốc và gia tốc.
Vector T7 là thiết bị đeo mới được sử dụng với hệ thống ClearSky. Vector T7 tương tự như các thiết bị trước đây được sử dụng với ClearSky (Vector S7 và Catapult T6), với tần số lấy mẫu là 10 Hz.
Tuy nhiên, Vector T7 sử dụng giao thức Time Difference of Arrival (TDOA) để xác định vị trí trong khi các thiết bị trước đó sử dụng giao thức Two Way Ranging (TWR). Lợi ích của giao thức TDOA là nó yêu cầu mức tiêu thụ điện năng thấp hơn đáng kể cho thiết bị so với giao thức TWR trong khi vẫn duy trì độ chính xác của dữ liệu vị trí.
Việc giảm công suất này cho phép giảm kích thước của thiết bị. Kích thước thiết bị nhỏ hơn cho phép Vector T7 được đeo ở nhiều vị trí trên người vận động viên, bao gồm vị trí truyền thống giữa hai bả vai hoặc đặt ở thắt lưng.
Hệ thống theo dõi vận động viên cần xác thực khả năng đo chuyển động của vận động viên để các chuyên gia có thể tin tưởng vào dữ liệu cho phép họ đưa ra quyết định về việc luyện tập và thực hành thi đấu. Cũng như mọi công nghệ, các nhà sản xuất sẽ phát hành các mẫu được cập nhật theo thời gian khi cả phần cứng thiết bị và các thuật toán cơ bản của chúng được cải tiến.
Mỗi mô hình mới đều cần xác thực để xác định khả năng của thiết bị mới trong việc đo lường những gì cần đo (ví dụ: vị trí, vận tốc và gia tốc). 1 Điều này thường được thực hiện bằng cách so sánh dữ liệu từ thiết bị với một phép đo tiêu chuẩn. Hệ thống Vicon là hệ thống camera ghi lại chuyển động được coi là tiêu chuẩn vàng để đo vị trí. Vicon thường được sử dụng làm phép đo tiêu chuẩn trong quá trình xác thực công nghệ theo dõi vận động viên. 2, 3
Các nghiên cứu đã đánh giá tính hợp lệ của các thiết bị Catapult T6 trong việc đo khoảng cách, vận tốc và gia tốc trong các nhiệm vụ cụ thể của môn thể thao đồng đội, bao gồm nỗ lực tối đa tuyến tính và chuyển động thay đổi hướng. 4,5,6
Các nghiên cứu này sử dụng hệ thống camera ghi lại chuyển động (Vicon hoặc Qualisys Oqus) làm thước đo tiêu chuẩn với tất cả các nghiên cứu đều kết luận rằng các thiết bị Catapult T6 có giá trị chấp nhận được để đánh giá chuyển động của vận động viên. Do Vector T7 chỉ mới được phát triển gần đây nên cần phải xác nhận thiết bị này.
Do đó, mục đích của nghiên cứu này là đánh giá tính hợp lệ của thiết bị Vector T7 mới để đo khoảng cách, vận tốc và gia tốc.
→ Tải xuống Sách trắng Vector T7 bằng cách nhấp vào đây .

2. PHƯƠNG PHÁP
Sáu người tham gia nam hoạt động giải trí (28,8 ± 5,6 tuổi) đã tham gia vào nghiên cứu này. Tất cả những người tham gia đều cung cấp sự đồng ý bằng văn bản cho việc tham gia nghiên cứu và các thủ tục được sử dụng đã được tiến hành với sự chấp thuận của Ủy ban Đạo đức Nghiên cứu Con người của Đại học La Trobe.
Việc thu thập dữ liệu được tiến hành trong một nhà thi đấu thể thao có kích thước 40 x 70 m, bao gồm ba sân bóng rổ. Những người tham gia đã thực hiện bảy lần thử nghiệm chuyển động khác nhau trong một khu vực rộng 20 x 5 m trên một trong những sân bóng rổ. Trong quá trình thử nghiệm, dữ liệu chuyển động của người chơi được thu thập thông qua LPS (Catapult ClearSky, Catapult, Melbourne, Úc) và hệ thống phân tích chuyển động 20 camera (Vantage, Vicon Motion Systems, Oxford, Vương quốc Anh).
Mô tả và sơ đồ của mỗi lần thử nghiệm được thể hiện trong Bảng 1 và Hình 1. Người tham gia được yêu cầu thực hiện tất cả các lần thử nghiệm ở cường độ tối đa và dừng hẳn khi kết thúc thử nghiệm (giảm tốc). Người tham gia thực hiện khởi động trong 5 phút trước khi bắt đầu thử nghiệm. Mỗi lần thử nghiệm chuyển động được thực hiện hai lần, tổng cộng là 14 lần thử nghiệm, mỗi lần cách nhau khoảng 3 phút.
Những người tham gia được trang bị bốn thiết bị Vector T7 được đặt ở bốn vị trí khác nhau. Một thiết bị được đặt giữa hai bả vai của người tham gia bằng áo vest do nhà sản xuất cung cấp.
Ba thiết bị còn lại được đặt quanh eo của người tham gia, cụ thể là ở phía trước (mặt cắt ngang của điểm giữa giữa hai gai chậu trước trên), bên trái (mặt cắt ngang của điểm giữa giữa gai chậu trước và sau trên) và phía sau (mặt cắt ngang của điểm giữa giữa hai gai chậu sau trên) trong một kẹp cạp quần tùy chỉnh do nhà sản xuất cung cấp và được kẹp vào quần đùi của người tham gia.
Riêng đối với các thử nghiệm di chuyển, một thử nghiệm tĩnh đã được thực hiện để đánh giá các thiết bị Vector T7 về độ ổn định của vị trí của chúng bằng cách sử dụng giao thức đặt cố định. Ba thiết bị được đặt trên một chân máy (cao 1,5 m) và để thu thập dữ liệu trong khoảng thời gian 10 phút. Trong số các thiết bị, hai thiết bị được đặt ở giữa sân giữa và một thiết bị được đặt ở rìa rộng của sân.
ClearSky LPS được lắp đặt xung quanh nhà thi đấu thể thao và bao gồm 21 nút neo cố định ở độ cao trung bình 8,4 m so với mặt đất với khoảng cách trung bình 10,4 m giữa mỗi nút. Dữ liệu được thu thập ở tần số 10 Hz và được xử lý bằng phần mềm của nhà sản xuất ( OpenField phiên bản 3.9.0). Dữ liệu về vận tốc, gia tốc, vị trí xy và đồng hồ đo quãng đường (khoảng cách tích lũy) đã được xuất cho mỗi lần thử nghiệm để phân tích thêm.
Hệ thống phân tích chuyển động 20 camera (Vicon) lấy mẫu ở tần số 100 Hz, được sử dụng làm tiêu chuẩn đo khoảng cách, vận tốc và gia tốc. Các camera được gắn trên chân máy và đặt cách chu vi khu vực thực hiện thử nghiệm chuyển động 3 m. Bốn điểm đánh dấu phản quang có đường kính 32 mm được đặt ở bên ngoài áo vest do nhà sản xuất cung cấp và mỗi kẹp thắt lưng chứa các thiết bị Vector T7, tương ứng với phần giữa của mỗi thiết bị.
Dữ liệu Vicon được dán nhãn và xử lý bằng Vicon Nexus 2.14. Xử lý dữ liệu của dữ liệu Vicon thô bao gồm lọc bằng bộ lọc Butterworth thông thấp bậc bốn với tần số cắt 3Hz được xác định dựa trên phân tích dư. Các khoảng trống trong dữ liệu ≤50 ms (5 mẫu) được lấp đầy bằng nội suy spline, các khoảng trống ≥50 ms bị loại khỏi phân tích. Tọa độ XY của dữ liệu Vicon 100 Hz đã lọc được sử dụng để phân tích, tọa độ z (độ dịch chuyển theo phương thẳng đứng) bị bỏ qua trong các phép tính vì ClearSky được cấu hình để định vị hai chiều (2D).
Đối với mỗi một trong bốn điểm đánh dấu Vicon trong mỗi lần thử nghiệm chuyển động (n=320), vận tốc 2D được tính bằng cách phân biệt dữ liệu vị trí và áp dụng cùng một bộ lọc được sử dụng trong phần mềm của nhà sản xuất trên dữ liệu LPS. Nhà sản xuất cung cấp thông tin này cho các nhà nghiên cứu; tuy nhiên, thông tin chi tiết không được đưa vào đây do quyền sở hữu trí tuệ của nhà sản xuất. Tương tự như vậy, gia tốc được tính bằng cách phân biệt dữ liệu vận tốc và lọc bằng cách sử dụng thông số kỹ thuật của nhà sản xuất.
Các số liệu thu được từ Vicon được lấy mẫu xuống 10Hz và sau đó được đồng bộ hóa với dữ liệu Catapult bằng cách tương quan chéo các tín hiệu vận tốc để tìm độ lệch thời gian tối đa hóa tương quan. Tất cả quá trình xử lý và phân tích dữ liệu được thực hiện bằng ngôn ngữ lập trình thống kê R (phiên bản 4.0.4) 7 và gói gsignal 8 .
Bảng 1. Mô tả các thử nghiệm chuyển động
| Sự thử nghiệm # | Sự miêu tả |
| 1 | Chạy nước rút thẳng 5 m |
| 2 | Chạy nước rút thẳng 10 m |
| 3 | Chạy nước rút thẳng 20 m |
| 4 | Chạy nước rút thẳng 5 m sang góc 45 độ Đổi hướng sang chạy nước rút thẳng 5 m |
| 5 | Chạy nước rút thẳng 5 m thành 90 độ Đổi hướng thành chạy nước rút thẳng 5 m |
| 6 | Chạy nước rút thẳng 5 m thành 180 độ Đổi hướng thành chạy nước rút thẳng 5 m |
| 7 | Một mạch bao gồm sự kết hợp của chạy nước rút tuyến tính và thay đổi hướng |
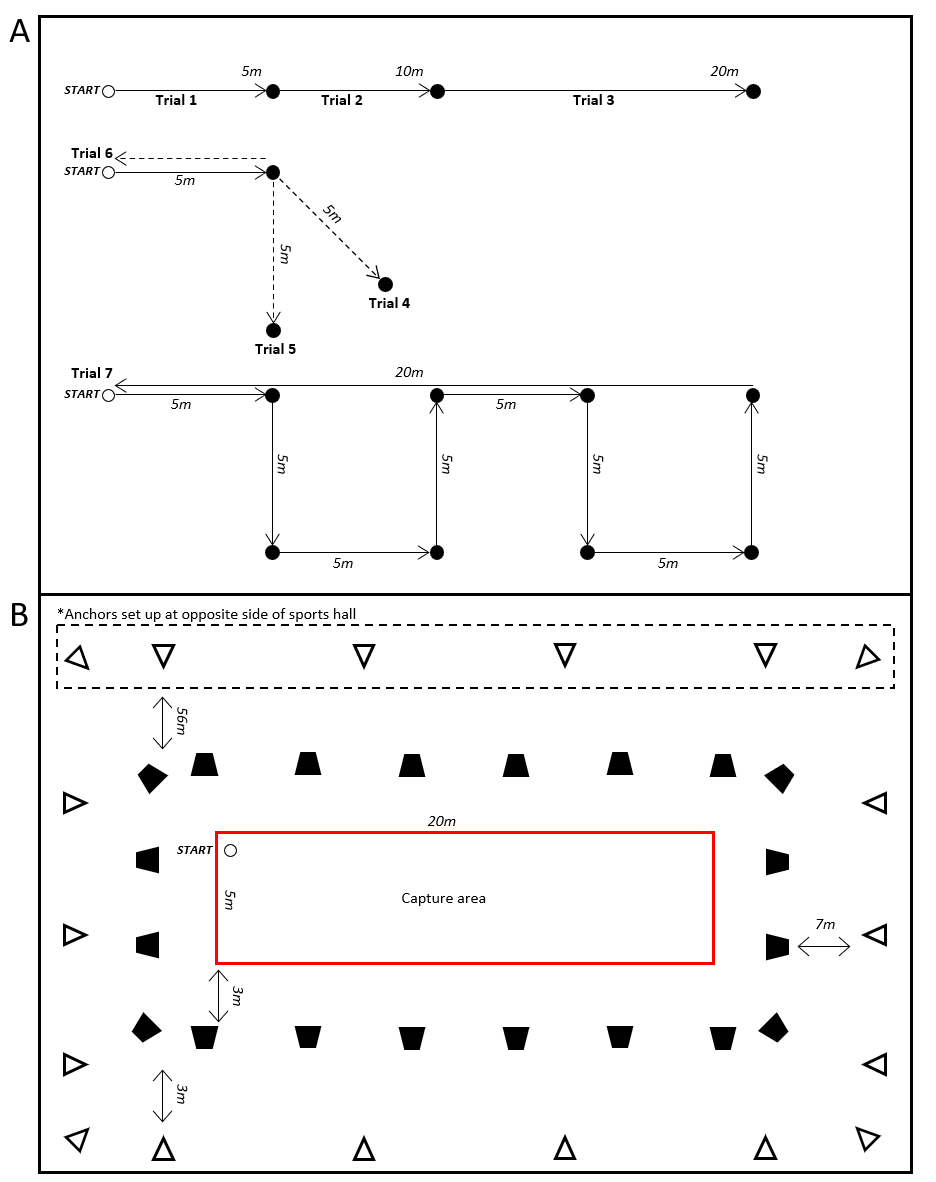
Hình 1. A) Sơ đồ bảy thử nghiệm chuyển động khác nhau. B) Thiết lập trong quá trình thu thập dữ liệu, tất cả các thử nghiệm đều bắt đầu từ điểm tham chiếu bắt đầu (hình tròn màu trắng), camera Vicon (hình thang màu đen), các nút neo ClearSky (hình tam giác màu trắng). Lưu ý: Toàn bộ Nhà thi đấu thể thao (40 x 70m không được hiển thị đầy đủ để rõ ràng).
→ Tải xuống Sách trắng Vector T7 bằng cách nhấp vào đây .

3. PHÂN TÍCH THỐNG KÊ
Thử nghiệm chuyển động
Các số liệu sau đây được tính toán cho mỗi lần thử nghiệm so sánh dữ liệu thu được từ Vector T7 và Vicon; chênh lệch chuẩn trung bình căn bậc hai (RMSD) cho vận tốc và gia tốc và chênh lệch tuyệt đối trung bình (MAD) cho khoảng cách vị trí mẫu-mẫu. Các lần thử nghiệm Vicon có dữ liệu bị thiếu hơn 10% đã bị loại khỏi các phân tích (n = 12) do phương pháp lọc đưa vào các hiệu ứng cạnh khi có khoảng trống trong dữ liệu. Kết quả được trình bày dưới dạng trung bình, trung vị và khoảng tứ phân vị (IQR) cho mỗi số liệu, trong tất cả các lần thử nghiệm và được phân tầng theo vị trí thiết bị và loại chuyển động.
Thử nghiệm tĩnh
Đối với các thử nghiệm thiết bị tĩnh, khoảng cách vị trí mẫu đến mẫu và độ dịch chuyển đã được tính toán. Kết quả được trình bày dưới dạng giá trị trung bình, trung vị, IQR và tổng tích lũy cho khoảng cách và độ dịch chuyển từ mẫu đầu tiên đến mẫu cuối cùng trong thử nghiệm kéo dài 10 phút. "Đồng hồ đo quãng đường" của nhà sản xuất đã được đưa vào kết quả cho mỗi thiết bị như một điểm tham chiếu cho khoảng cách đã di chuyển được tính toán.
4. KẾT QUẢ
Thử nghiệm chuyển động
Sự khác biệt giữa vận tốc thu được từ ClearSky LPS và Vicon được thể hiện trong Bảng 2 và Hình 2. Trong bốn vị trí thiết bị được thử nghiệm, thiết bị đeo trong áo vest có giá trị RMSD trung bình và trung vị nhỏ nhất, và thiết bị đeo ở phía trước eo có giá trị RMSD cao nhất.
Quan sát này được lặp lại đối với RMSD trong gia tốc ( Bảng 3 và Hình 2 ). Các thử nghiệm chuyển động tuyến tính có sự đồng thuận chặt chẽ nhất giữa các phương pháp về vận tốc. Thử nghiệm chuyển động thay đổi hướng 180 0 dẫn đến các giá trị RMSD cao nhất cho gia tốc.
Bảng 2. Vận tốc RMSD (m·s -1 ) giữa các thiết bị Catapult và hệ thống phân tích chuyển động Vicon.
| N | Nghĩa là | Trung vị | IQR | ||
| Tất cả | 308 | 0.19 | 0.14 | 0,11 – 0,21 | |
| Vị trí thiết bị | Áo vest | 79 | 0.14 | 0.12 | 0,09 – 0,15 |
| Mặt sau | 77 | 0.20 | 0.15 | 0,12 – 0,22 | |
| Đằng trước | 76 | 0.24 | 0.17 | 0,14 – 0,27 | |
| Phía bên trái | 76 | 0.18 | 0.13 | 0,11 – 0,18 | |
| Kiểu chuyển động | Tuyến tính | 140 | 0.17 | 0.12 | 0,09 – 0,18 |
| COD 45 | 44 | 0.27 | 0.22 | 0,14 – 0,32 | |
| COD 90 | 43 | 0.18 | 0.15 | 0,11 – 0,20 | |
| COD 180 | 48 | 0.18 | 0.14 | 0,13 – 0,17 | |
| Mạch điện | 33 | 0.22 | 0.18 | 0,17 – 0,24 |
Bảng 3. Gia tốc RMSD (m·s -2 ) giữa các thiết bị Catapult và hệ thống phân tích chuyển động Vicon.
| N | Nghĩa là | Trung vị | IQR | ||
| Tất cả | 308 | 0.79 | 0.76 | 0,64 – 0,91 | |
| Vị trí thiết bị | Áo vest | 79 | 0.75 | 0.74 | 0,62 – 0,81 |
| Mặt sau | 77 | 0.77 | 0.76 | 0,60 – 0,91 | |
| Đằng trước | 76 | 0.85 | 0.83 | 0,66 – 0,97 | |
| Phía bên trái | 76 | 0.79 | 0.79 | 0,65 – 0,88 | |
| Kiểu chuyển động | Tuyến tính | 140 | 0.69 | 0.73 | 0,60 – 0,81 |
| COD 45 | 44 | 0.67 | 0.67 | 0,48 – 0,87 | |
| COD 90 | 43 | 0.75 | 0.74 | 0,66 – 0,85 | |
| COD 180 | 48 | 1.24 | 1.25 | 1,16 – 1,32 | |
| Mạch điện | 33 | 0.77 | 0.80 | 0,73 – 0,86 |
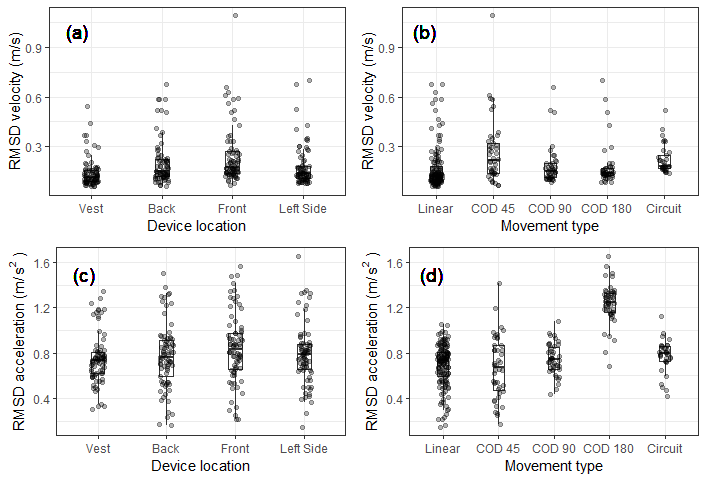
Hình 2. Kết quả vận tốc RMSD (hàng đầu tiên) và gia tốc (hàng thứ hai) cho mỗi lần thử nghiệm, phân tầng theo vị trí thiết bị (cột đầu tiên) và loại chuyển động (cột thứ hai).
Bảng 4 cho thấy MAD trong khoảng cách mẫu-mẫu thu được từ dữ liệu theo dõi vị trí Vector T7 và Vicon. Trong tất cả các thử nghiệm, chênh lệch trung bình là 0,39 m, chênh lệch lớn hơn ở thiết bị đeo ở phía trước thắt lưng và trong quá trình thử nghiệm chuyển động mạch.
Bảng 4. MAD theo khoảng cách mẫu-mẫu (m) giữa các thiết bị Catapult và hệ thống phân tích chuyển động Vicon.
| N | Nghĩa là | Trung vị | IQR | ||
| Tất cả | 308 | 0.04 | 0.03 | 0,02 – 0,05 | |
| Vị trí thiết bị | Áo vest | 79 | 0.03 | 0.03 | 0,02 – 0,04 |
| Mặt sau | 77 | 0.04 | 0.03 | 0,02 – 0,04 | |
| Đằng trước | 76 | 0.05 | 0.04 | 0,03 – 0,06 | |
| Phía bên trái | 76 | 0.04 | 0.03 | 0,03 – 0,04 | |
| Kiểu chuyển động | Tuyến tính | 140 | 0.03 | 0.03 | 0,02 – 0,04 |
| COD 45 | 44 | 0.04 | 0.04 | 0,03 – 0,05 | |
| COD 90 | 43 | 0.04 | 0.03 | 0,03 – 0,04 | |
| COD 180 | 48 | 0.04 | 0.03 | 0,03 – 0,04 | |
| Mạch điện | 33 | 0.07 | 0.06 | 0,05 – 0,09 |
Thử nghiệm tĩnh
Khoảng cách trung vị và khoảng cách từ mẫu đến mẫu IQR cho tất cả các thiết bị cố định là bằng 0 ( Bảng 5 ), cho thấy rằng trong phần lớn các bước thời gian, các thiết bị không thay đổi tọa độ x hoặc y của chúng.
Tuy nhiên, các thiết bị đã ghi lại một số thay đổi về vị trí sao cho khoảng cách trung bình giữa các mẫu xấp xỉ 1-2 mm. Trong hơn 10 phút không có độ lệch hướng mạnh và vị trí cuối cùng của các thiết bị rất gần với vị trí ban đầu của chúng (độ dịch chuyển cuối cùng theo thứ tự vài cm).
Quá trình xử lý và lọc dữ liệu độc quyền được đưa vào tính toán khoảng cách tích lũy của nhà sản xuất (biến 'đồng hồ đo quãng đường') có thể hiệu chỉnh những thay đổi nhỏ về vị trí và trả về tổng khoảng cách nhỏ hơn 0,02 m.
Bảng 5. Kết quả thử nghiệm tĩnh (ba thiết bị để yên trong 10 phút).
| Được suy ra từ vị trí x, y | |||||
| Khoảng cách giữa các mẫu liên tiếp (m) | Độ dịch chuyển tại mẫu cuối cùng (m) | Đồng hồ đo quãng đường tại mẫu cuối cùng (m) | |||
| Thiết bị | Nghĩa là | Trung vị | IQR | ||
| Tất cả | 0.001898 | 0 | 0 – 0 | ||
| 1 | 0.001644 | 0 | 0 – 0 | (-0,02, -0,05) | 0.02 |
| 2 | 0.001548 | 0 | 0 – 0 | (-0,03, -0,06) | 0.00 |
| 3 | 0.002502 | 0 | 0 – 0 | (-0,06, -0,05) | 0.01 |
→ Tải xuống Sách trắng Vector T7 bằng cách nhấp vào đây .
5. TÓM TẮT
- Các thiết bị Vector T7 có RMSD thấp đối với các phép đo vận tốc và gia tốc và MAD thấp đối với các phép đo khoảng cách trong các thử nghiệm chuyển động có tốc độ tăng tốc, giảm tốc và thay đổi hướng cao.
- Các thiết bị Vector T7 hiển thị RMSD thấp tương tự cho các phép đo gia tốc trong tất cả các thử nghiệm chuyển động ngoại trừ trường hợp thay đổi hướng 180 độ, trong đó RMSD cao hơn một chút. Điều này có thể là do các chuyển động trong thử nghiệm này liên quan đến tốc độ tăng tốc/giảm tốc cao hơn và cho thấy lỗi tăng khi tốc độ thay đổi vận tốc tăng. Tuy nhiên, lỗi này vẫn có thể được coi là thấp (RMSD trung bình là 1,24).
- Vị trí đặt áo vest dẫn đến sai số thấp nhất đối với các phép đo vận tốc, gia tốc và khoảng cách trong khi vị trí đặt thiết bị ở phía trước thắt lưng dẫn đến sai số cao nhất. Bất kể vị trí đặt thiết bị nào, tất cả các vị trí đều dẫn đến sai số thấp trên tất cả các phép đo với tất cả RMSD ≤ 0,85.
- Độ ổn định vị trí của các thiết bị Vector T7 khi đứng yên là cao với khoảng cách trung bình giữa các mẫu là ~1-2 mm.
- Lỗi thấp cho thấy thiết bị Vector T7 được sử dụng kết hợp với ClearSky cung cấp phép đo hợp lệ về vận tốc, gia tốc và khoảng cách trong các nhiệm vụ cụ thể của môn thể thao đồng đội, bao gồm nỗ lực tuyến tính tối đa và chuyển động đổi hướng.
→ Tải xuống Sách trắng Vector T7 bằng cách nhấp vào đây .
6. TÀI LIỆU THAM KHẢO
- Malone, JJ, Lovell, R., Varley, MC, & Coutts, AJ (2017). Giải mã hộp đen: ứng dụng và cân nhắc khi sử dụng thiết bị GPS trong thể thao. Tạp chí quốc tế về sinh lý học và hiệu suất thể thao , 12(s2), S2-18.
- Linke, D., Link, D., & Lames, M. (2018). Xác thực hiệu suất điện tử và hệ thống theo dõi EPTS trong điều kiện thực địa. PloS one , 13(7), e0199519.
- Linke, D., Link, D., & Lames, M. (2020). Tính hợp lệ cụ thể của hệ thống theo dõi video quang học TRACAB trong bóng đá. PloS one , 15(3), e0230179.
- Luteberget, LS, Spencer, M., & Gilgien, M. (2018). Tính hợp lệ của hệ thống định vị cục bộ Catapult ClearSky T6 cho các bài tập thể thao đồng đội cụ thể, trong điều kiện trong nhà. Frontiers in physiology , 9, 115.
- Serpiello, FR, Hopkins, WG, Barnes, S., Tavrou, J., Duthie, GM, Aughey, RJ, & Ball, K. (2018). Tính hợp lệ của hệ thống định vị cục bộ băng thông cực rộng để đo chuyển động trong thể thao trong nhà. Tạp chí khoa học thể thao , 36(15), 1727-1733.
- Hodder, RW, Ball, KA, & Serpiello, FR (2020). Tính hợp lệ của tiêu chí hệ thống định vị cục bộ Catapult ClearSky T6 để đo khoảng cách giữa các đơn vị. Cảm biến , 20(13), 3693.
- Nhóm R Core (2021). R: Một ngôn ngữ và môi trường cho tính toán thống kê. R Foundation for Statistical Computing, Vienna, Áo. URL https://www.R-project.org/
- Van Boxtel, GJM, Laboissière, R., & Wilhelm, HD (2021). gsignal: Xử lý tín hiệu. URL: https://github.com/gjmvanboxtel/gsignal