Beyaz Kitap: Doğrulama Vektörü T7
Matthew C. Varley, Susanne Ellens, David Carey. Spor, Performans ve Beslenme Araştırma Grubu, Yardımcı Sağlık, İnsan Hizmetleri ve Spor Okulu, La Trobe Üniversitesi, Melbourne, VIC, Avustralya.
1. GİRİŞ
Sporcu takip sistemleri spor için önemli bir araç haline gelmiştir. Bu sistemler, uygulayıcıların antrenman yükünü, fiziksel performansı, taktiksel davranışı ve yaralanma riskini daha iyi anlamak için sporcuların hareketlerini ölçmelerine ve analiz etmelerine olanak tanır.1
Birçok takip sistemi mevcut olsa da, çoğu iç mekanlarda kullanıldığında sınırlamalara sahiptir. ClearSky yerel konumlandırma sistemi(LPS), kapalı ortamlarda sporcu performansının izlenmesini ve ölçülmesini sağlayan bir teknolojidir. Sistem özellikle mesafe, hız ve ivme gibi konum ve konumdan türetilen metriklerin çıktısını verir.
Vector T7, ClearSky sistemiyle birlikte kullanılan yeni bir giyilebilir cihazdır. Vector T7, 10 Hz örnekleme frekansıyla ClearSky ile kullanılan önceki cihazlara (Vector S7 ve Catapult T6) benzer.
Bununla birlikte, Vector T7 konum elde etmek için Varış Zaman Farkı (TDOA) protokolünü kullanırken, önceki cihazlar İki Yönlü Aralık (TWR) protokolünü kullanmaktadır. TDOA protokolünün avantajı, konum verilerinin doğruluğunu korurken TWR protokolüne kıyasla cihaz için önemli ölçüde daha düşük güç tüketimi gerektirmesidir.
Güçteki bu azalma cihazın boyutunun küçülmesini sağlar. Daha küçük cihaz boyutu, Vector T7 'nin kürek kemikleri arasına geleneksel yerleştirme veya bele yerleştirme dahil olmak üzere sporcu üzerinde çeşitli pozisyonlarda takılmasına olanak tanır.
Sporcu takip sistemleri, uygulayıcıların antrenman ve maç uygulamaları hakkında karar vermelerine olanak tanıyan verilere güvenebilmeleri için sporcu hareketlerini ölçme yeteneklerinin doğrulanmasını gerektirir. Tüm teknolojilerde olduğu gibi, hem cihaz donanımında hem de temel algoritmalarında iyileştirmeler yapıldıkça üreticiler zaman içinde güncellenmiş modelleri piyasaya süreceklerdir.
Her yeni model, yeni cihazın ölçmeyi amaçladığı şeyi (örn. konum, hız ve ivme) ölçme yeteneğini belirlemek için doğrulama gerektirir.1 Bu genellikle cihazdan alınan verilerin bir ölçütle karşılaştırılmasıyla yapılır. Vicon sistemi, pozisyon ölçümü için altın standart olarak kabul edilen bir hareket yakalama kamera sistemidir. Vicon'un sporcu izleme teknolojisinin doğrulanmasında bir kriter ölçütü olarak kullanılması yaygındır.2, 3
Çalışmalar, doğrusal maksimal efor ve yön değiştirme hareketleri de dahil olmak üzere takım sporlarına özgü görevler sırasında mesafe, hız ve ivme ölçümü için Catapult T6 cihazlarının geçerliliğini değerlendirmiştir.4,5,6
Bu çalışmalarda ölçüt olarak bir hareket yakalama kamera sistemi (Vicon veya Qualisys Oqus) kullanılmış ve tüm çalışmalarda Catapult T6 cihazlarının sporcu hareketlerini değerlendirmek için kabul edilebilir geçerliliğe sahip olduğu sonucuna varılmıştır. Vector T7'nin yakın zamanda geliştirildiği göz önüne alındığında, bu cihazın doğrulanması gerekmektedir.
Bu nedenle, bu çalışmanın amacı yeni Vector T7 cihazlarının mesafe, hız ve ivme ölçümü için geçerliliğini değerlendirmektir.
→ Bu Vector T7 Teknik Dokümanını buraya tıklayarak indirin.

2. YÖNTEMLER
Bu çalışmaya rekreasyonel olarak aktif altı erkek katılımcı (28.8 ± 5.6 yaş) katılmıştır. Tüm katılımcılar çalışmaya katılımları için yazılı onay vermiş ve kullanılan prosedürler La Trobe Üniversitesi İnsan Araştırmaları Etik Kurulu'nun onayı ile gerçekleştirilmiştir.
Veri toplama işlemi, üç basketbol sahasından oluşan 40 x 70 m ölçülerindeki bir spor salonunda gerçekleştirilmiştir. Katılımcılar basketbol sahalarından birinde 20 x 5 m'lik bir alanda yedi farklı hareket denemesi gerçekleştirmiştir. Denemeler sırasında oyuncu hareket verileri bir LPS (Catapult ClearSky, Catapult, Melbourne, Avustralya) ve 20 kameralı bir hareket analiz sistemi (Vantage, Vicon Motion Systems, Oxford, Birleşik Krallık) aracılığıyla toplanmıştır.
Her bir denemenin açıklaması ve şeması Tablo 1 ve Şekil 1'de gösterilmiştir. Katılımcılardan tüm denemeleri maksimal yoğunlukta gerçekleştirmeleri ve denemenin sonunda tamamen durmaları (yavaşlama) istenmiştir. Katılımcılar denemeye başlamadan önce 5 dakikalık bir ısınma gerçekleştirmiştir. Her hareket denemesi, her deneme ~3 dakika arayla toplam 14 deneme olacak şekilde iki kez gerçekleştirilmiştir.
Katılımcılara dört farklı yere yerleştirilmiş dört Vector T7 cihazı takılmıştır. Bir cihaz, üretici tarafından tedarik edilen yelek kullanılarak katılımcının kürek kemikleri arasına yerleştirildi.
Kalan üç cihaz katılımcıların beline, özellikle de ön tarafa (iki anterior superior iliak omurga arasındaki orta noktanın enine kesiti), sol tarafa (anterior ve posterior superior iliak omurgalar arasındaki orta noktanın enine kesiti) ve arkaya (iki posterior superior iliak omurga arasındaki orta noktanın enine kesiti) üretici tarafından sağlanan ve katılımcıların şortlarına takılan özel bir bel bandı klipsi içine yerleştirilmiştir.
Hareket denemelerinden ayrı olarak, Vector T7 cihazlarını sabit bir yerleştirme protokolü kullanarak konumlandırmalarının stabilitesi açısından değerlendirmek için statik bir deneme gerçekleştirilmiştir. Üç cihazın her biri bir tripod (1,5 m yükseklik) üzerine yerleştirilmiş ve 10 dakikalık bir süre boyunca veri toplamaya bırakılmıştır. Cihazlardan ikisi orta sahanın ortasına, biri ise sahanın geniş kenarına yerleştirilmiştir.
ClearSky LPS spor salonunun etrafına kurulmuş ve her bir düğüm arasında ortalama 10,4 m mesafe olacak şekilde yerden ortalama 8,4 m yüksekliğe sabitlenmiş 21 ankraj düğümünden oluşmuştur. Veriler 10 Hz'de yakalanmış ve üretici yazılımıOpenField sürüm 3.9.0) kullanılarak işlenmiştir. Hız, ivme, x-y konumu ve odometre (kümülatif mesafe) verileri daha fazla analiz için her deneme için dışa aktarılmıştır.
Kriter mesafe, hız ve ivme ölçümü olarak 100 Hz'de örnekleme yapan 20 kameralı hareket analiz sistemi (Vicon) kullanılmıştır. Kameralar tripodlara monte edilmiş ve hareket denemelerinin yapıldığı alanın çevresinden 3 m uzağa yerleştirilmiştir. Üretici tarafından tedarik edilen yeleğin ve Vector T7 cihazlarını içeren her bir bel bandı klipsinin dışına, her bir cihazın ortasına denk gelecek şekilde 32 mm çapında dört adet retro reflektif işaretleyici yerleştirilmiştir.
Vicon verileri Vicon Nexus 2.14 ile etiketlenmiş ve işlenmiştir. Ham Vicon verilerinin işlenmesi, kalıntı analizine dayalı olarak belirlenen 3Hz kesme frekansına sahip dördüncü dereceden düşük geçişli Butterworth filtresi kullanılarak filtrelemeden oluşmuştur. Verilerdeki ≤50 ms (5 örnek) boşluklar spline interpolasyonu kullanılarak doldurulmuş, ≥50 ms boşluklar analizden çıkarılmıştır. Filtrelenmiş 100 Hz Vicon verilerinin XY koordinatları analiz için kullanılmış, ClearSky iki boyutlu (2D) konumlandırma için yapılandırıldığından z koordinatları (dikey yer değiştirme) hesaplamalarda ihmal edilmiştir.
Her hareket denemesindeki dört Vicon işaretleyicisinin her biri için (n=320) 2D hız, konumsal veriler farklılaştırılarak ve üretici yazılımında kullanılan filtrenin aynısı LPS verilerine uygulanarak hesaplanmıştır. Bu bilgi araştırmacılara üretici tarafından sağlanmıştır; ancak üreticinin fikri mülkiyeti nedeniyle ayrıntılar burada yer almamaktadır. Benzer şekilde ivme de hız verilerinin farklılaştırılması ve üreticinin spesifikasyonları kullanılarak filtrelenmesiyle hesaplanmıştır.
Vicon'dan elde edilen ölçümler 10Hz'e kadar aşağı örneklenmiş ve ardından korelasyonu en üst düzeye çıkaran zaman ofsetini bulmak için hız sinyalleri çapraz ilişkilendirilerek Catapult verileriyle senkronize edilmiştir. Tüm veri işleme ve analiz işlemleri R istatistiksel programlama dili (sürüm 4.0.4)7 ve gsignal paketi8 kullanılarak gerçekleştirilmiştir.
Tablo 1. Hareket denemelerinin tanımı
| Deneme # | Açıklama |
| 1 | 5 m doğrusal sprint |
| 2 | 10 m doğrusal sprint |
| 3 | 20 m doğrusal sprint |
| 4 | 5 m doğrusal sprintten 45 derecelik Yön Değişimine ve 5 m doğrusal sprint |
| 5 | 5 m doğrusal sprintten 90 derecelik Yön Değişimine ve 5 m doğrusal sprint |
| 6 | 5 m doğrusal sprintten 180 derece Yön Değiştirmeye ve 5 m doğrusal sprint |
| 7 | Doğrusal sprintler ve Yön Değiştirme kombinasyonunu içeren bir devre |
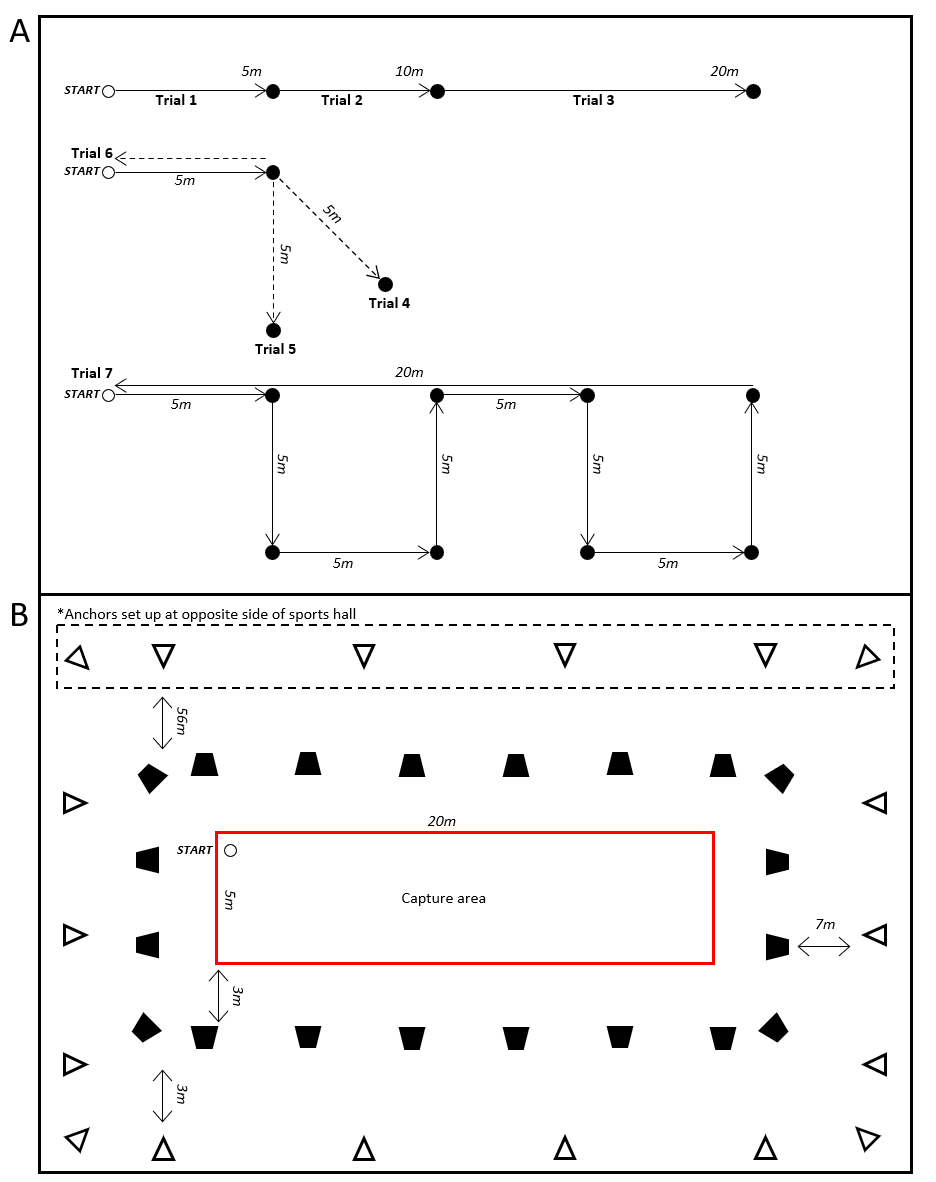
Şekil 1. A) Yedi farklı hareket denemesinin şeması. B) Veri toplama sırasındaki kurulum, tüm denemeler başlangıç referans noktasından (beyaz daire), Vicon kameralardan (siyah yamuk), ClearSky bağlantı düğümlerinden (beyaz üçgenler) başlamıştır. Not: Tüm Spor Salonu (40 x 70m netlik açısından tam olarak gösterilmemiştir).
→ Bu Vector T7 Teknik Dokümanını buraya tıklayarak indirin.

3. İSTATİSTİKSEL ANALİZ
Hareket denemeleri
Her deneme için Vector T7 ve Vicon'dan elde edilen veriler karşılaştırılarak aşağıdaki ölçütler hesaplanmıştır; hız ve ivme için kök ortalama standart fark (RMSD) ve örnekten örneğe konumsal mesafe için ortalama mutlak fark (MAD). 10'dan fazla eksik veriye sahip Vicon denemeleri, verilerde boşlukların bulunduğu filtreleme yaklaşımı tarafından kenar etkilerinin ortaya çıkması nedeniyle analizlerden çıkarılmıştır (n = 12). Sonuçlar, tüm denemelerde ve cihaz konumu ve hareket türüne göre tabakalandırılmış olarak her bir ölçüm için ortalama, medyan ve çeyrekler arası aralıklar (IQR) olarak sunulmuştur.
Statik denemeler
Statik cihaz denemeleri için örnekten örneğe konumsal mesafe ve yer değiştirme hesaplanmıştır. Sonuçlar ortalama, medyan, IQR ve mesafe için kümülatif toplam ve 10 dakikalık denemede ilk numuneden son numuneye yer değiştirme olarak sunulmuştur. Üretici metriği "kilometre sayacı", hesaplanan mesafe için bir referans noktası olarak her bir cihazın sonuçlarına dahil edilmiştir.
4. SONUÇLAR
Hareket denemeleri
ClearSky LPS ile Vicon'dan elde edilen hız arasındaki farklar Tablo 2 ve Şekil 2'de gösterilmektedir. Test edilen dört cihaz konumu arasında, yeleğe takılan cihaz en küçük ortalama ve medyan RMSD'ye ve belin önüne takılan cihaz en yüksek RMSD'ye sahipti.
Bu gözlem ivmedeki RMSD için de tekrarlanmıştır(Tablo 3 ve Şekil 2). Doğrusal hareket denemeleri, hız için yöntemler arasında en yakın uyuma sahipti.1800 yön değiştirme hareketi denemesi, ivme için en yüksek RMSD değerleriyle sonuçlanmıştır.
Tablo 2. Catapult cihazları ve Vicon hareket analiz sistemi arasındaki RMSD hızı (m-s-1).
| N | Ortalama | Medyan | IQR | ||
| Tümü | 308 | 0.19 | 0.14 | 0.11 - 0.21 | |
| Cihaz konumu | Yelek | 79 | 0.14 | 0.12 | 0.09 - 0.15 |
| Geri | 77 | 0.20 | 0.15 | 0.12 - 0.22 | |
| Ön | 76 | 0.24 | 0.17 | 0.14 - 0.27 | |
| Sol Taraf | 76 | 0.18 | 0.13 | 0.11 - 0.18 | |
| Hareket türü | Doğrusal | 140 | 0.17 | 0.12 | 0.09 - 0.18 |
| COD 45 | 44 | 0.27 | 0.22 | 0.14 - 0.32 | |
| COD 90 | 43 | 0.18 | 0.15 | 0.11 - 0.20 | |
| COD 180 | 48 | 0.18 | 0.14 | 0.13 - 0.17 | |
| Devre | 33 | 0.22 | 0.18 | 0.17 - 0.24 |
Tablo 3. Catapult cihazları ve Vicon hareket analiz sistemi arasındaki RMSD ivmesi (m-s-2).
| N | Ortalama | Medyan | IQR | ||
| Tümü | 308 | 0.79 | 0.76 | 0.64 - 0.91 | |
| Cihaz konumu | Yelek | 79 | 0.75 | 0.74 | 0.62 - 0.81 |
| Geri | 77 | 0.77 | 0.76 | 0.60 - 0.91 | |
| Ön | 76 | 0.85 | 0.83 | 0.66 - 0.97 | |
| Sol Taraf | 76 | 0.79 | 0.79 | 0.65 - 0.88 | |
| Hareket türü | Doğrusal | 140 | 0.69 | 0.73 | 0.60 - 0.81 |
| COD 45 | 44 | 0.67 | 0.67 | 0.48 - 0.87 | |
| COD 90 | 43 | 0.75 | 0.74 | 0.66 - 0.85 | |
| COD 180 | 48 | 1.24 | 1.25 | 1.16 - 1.32 | |
| Devre | 33 | 0.77 | 0.80 | 0.73 - 0.86 |
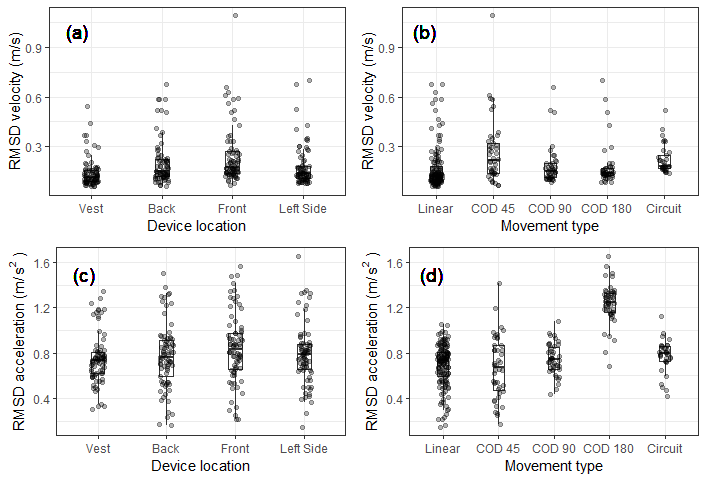
Şekil 2. Cihaz konumuna (ilk sütunlar) ve hareket türüne (ikinci sütun) göre katmanlandırılmış her deneme için RMSD hız (ilk satır) ve ivme (ikinci satır) sonuçları.
Tablo 4 'te Vector T7 ve Vicon konumsal takip verilerinden elde edilen örnekten örneğe mesafedeki MAD gösterilmektedir. Tüm denemelerde ortalama fark 0,39 m'dir, belin önüne takılan cihazda ve devre hareketi denemesi sırasında farklar daha büyüktür.
Tablo 4. Catapult cihazları ile Vicon hareket analiz sistemi arasındaki numuneden numuneye mesafedeki (m) MAD.
| N | Ortalama | Medyan | IQR | ||
| Tümü | 308 | 0.04 | 0.03 | 0.02 - 0.05 | |
| Cihaz konumu | Yelek | 79 | 0.03 | 0.03 | 0.02 - 0.04 |
| Geri | 77 | 0.04 | 0.03 | 0.02 - 0.04 | |
| Ön | 76 | 0.05 | 0.04 | 0.03 - 0.06 | |
| Sol Taraf | 76 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Hareket türü | Doğrusal | 140 | 0.03 | 0.03 | 0.02 - 0.04 |
| COD 45 | 44 | 0.04 | 0.04 | 0.03 - 0.05 | |
| COD 90 | 43 | 0.04 | 0.03 | 0.03 - 0.04 | |
| COD 180 | 48 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Devre | 33 | 0.07 | 0.06 | 0.05 - 0.09 |
Statik denemeler
Tüm sabit cihazlar için ortanca ve IQR örnekten örneğe mesafenin sıfır olması(Tablo 5), zaman adımlarının çoğunda cihazların x veya y koordinatlarını değiştirmediğini göstermektedir.
Ancak cihazlar, numuneler arasındaki ortalama mesafe yaklaşık 1-2 mm olacak şekilde bazı konum değişiklikleri kaydetmiştir. 10 dakika boyunca güçlü bir yön sapması olmamıştır ve cihazların nihai konumu başlangıç konumlarına çok yakın olmuştur (nihai yer değiştirme birkaç santimetre mertebesinde).
Üreticinin kümülatif mesafe hesaplamasına ('kilometre sayacı' değişkeni) dahil edilen özel veri işleme ve filtreleme, konumdaki küçük değişiklikleri düzeltebilmiş ve 0,02 m'den daha az toplam mesafeler döndürmüştür.
Tablo 5. Statik denemelerin sonuçları. Statik denemelerin sonuçları (üç cihaz 10 dakika boyunca sabit bırakılmıştır).
| x, y konumlarından türetilmiştir | |||||
| Ardışık örnekler arasındaki mesafe (m) | Son örnekte yer değiştirme (m) | Son numunedeki kilometre sayacı (m) | |||
| Cihaz | Ortalama | Medyan | IQR | ||
| Tümü | 0.001898 | 0 | 0 - 0 | ||
| 1 | 0.001644 | 0 | 0 - 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 - 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 - 0 | (-0.06, -0.05) | 0.01 |
→ Bu Vector T7 Teknik Dokümanını buraya tıklayarak indirin.
5. ÖZET
- Vector T7 cihazları, yüksek hızlanma, yavaşlama ve yön değiştirme oranları içeren hareket denemeleri sırasında hız ve ivme ölçümleri için düşük bir RMSD'ye ve mesafe ölçümleri için düşük bir MAD'ye sahipti.
- Vector T7 cihazları, RMSD'nin biraz daha yüksek olduğu 180 derecelik yön değiştirme hariç tüm hareket denemelerinde hızlanma ölçümleri için benzer düşük RMSD sergilemiştir. Bu durum muhtemelen bu denemedeki hareketlerin daha yüksek hızlanma/yavaşlama oranları içermesinden kaynaklanmaktadır ve hızdaki değişim oranı arttıkça hatanın da arttığını göstermektedir. Ancak bu hata yine de düşük kabul edilebilir (ortalama RMSD 1,24).
- Yelek yerleşimi hız, ivme ve mesafe ölçümleri için en düşük hatayla sonuçlanırken, cihazın belin ön kısmına yerleştirilmesi en yüksek hatayla sonuçlanmıştır. Cihaz yerleşiminden bağımsız olarak tüm konumlar, tüm RMSD ≤ 0,85 olan tüm ölçümlerde düşük hata ile sonuçlanmıştır.
- Vector T7 cihazlarının sabit durumdaki konumsal kararlılığı, numuneler arasındaki ortalama ~1-2 mm mesafe ile yüksekti.
- Düşük hata, ClearSky ile birlikte kullanılan Vector T7 cihazının, doğrusal maksimal eforlar ve yön değiştirme hareketleri dahil olmak üzere takım sporlarına özgü görevler sırasında geçerli bir hız, ivme ve mesafe ölçümü sağladığını göstermektedir.
→ Bu Vector T7 Teknik Dokümanını buraya tıklayarak indirin.
6. REFERANSLAR
- Malone, J. J., Lovell, R., Varley, M. C., & Coutts, A. J. (2017). Kara kutuyu açmak: sporda GPS cihazlarının kullanımına yönelik uygulamalar ve dikkat edilmesi gerekenler. Uluslararası spor fizyolojisi ve performansı dergisi, 12(s2), S2-18.
- Linke, D., Link, D., & Lames, M. (2018). Elektronik performans ve takip sistemleri EPTS'nin saha koşullarında doğrulanması. PloS one, 13(7), e0199519.
- Linke, D., Link, D., & Lames, M. (2020). TRACAB'ın optik video izleme sistemlerinin futbola özgü geçerliliği. PloS one, 15(3), e0230179.
- Luteberget, L. S., Spencer, M., & Gilgien, M. (2018). Catapult ClearSky T6 yerel konumlandırma sisteminin iç mekan koşullarında takım sporlarına özgü antrenmanlar için geçerliliği. Frontiers in physiology, 9, 115.
- Serpiello, F. R., Hopkins, W. G., Barnes, S., Tavrou, J., Duthie, G. M., Aughey, R. J., & Ball, K. (2018). Kapalı alan sporlarında lokomosyonu ölçmek için ultra geniş bant yerel konumlandırma sisteminin geçerliliği. Journal of sports sciences, 36(15), 1727-1733.
- Hodder, R. W., Ball, K. A., & Serpiello, F. R. (2020). Birimler arası mesafeyi ölçmek için Catapult ClearSky T6 yerel konumlandırma sisteminin kriter geçerliliği. Sensors, 20(13), 3693.
- R Çekirdek Ekibi (2021). R: İstatistiksel hesaplama için bir dil ve ortam. R Foundation for Statistical Computing, Viyana, Avusturya. URL https://www.R-project.org/
- Van Boxtel, G.J.M., Laboissière, R., & Wilhelm, H.D. (2021). gsignal: Sinyal işleme. URL: https://github.com/gjmvanboxtel/gsignal