백서: 검증 벡터 T7
매튜 C. 발리, 수잔 엘렌스, 데이비드 캐리. 호주 빅토리아주 멜버른에 위치한 라 트로브 대학교 연합 보건, 복지 및 스포츠 학교의 스포츠, 성능 및 영양 연구 그룹.
1. 소개
선수 추적 시스템은 스포츠에서 필수적인 도구가 되었습니다. 이러한 시스템을 통해 선수의 움직임을 정량화하고 분석하여 훈련량, 신체 능력, 전술적 행동, 부상 위험을 더 잘 이해할 수 있습니다.1
많은 추적 시스템을 사용할 수 있지만 대부분 실내에서 사용할 때는 한계가 있습니다. 클리어스카이 로컬 포지셔닝 시스템(LPS)은 실내 환경에서 선수의 퍼포먼스를 추적하고 측정할 수 있는 기술입니다. 특히 이 시스템은 거리, 속도, 가속도 등 위치 및 위치에서 파생된 지표를 출력합니다.
벡터 T7은 클리어스카이 시스템과 함께 사용되는 새로운 웨어러블 디바이스입니다. Vector T7은 샘플링 주파수가 10Hz로 ClearSky와 함께 사용되는 이전 디바이스(Vector S7 및 Catapult T6)와 유사합니다.
그러나 이전 디바이스는 양방향 거리 측정(TWR) 프로토콜을 사용하는 반면, 벡터 T7은 도착 시간 차이(TDOA) 프로토콜을 사용하여 위치를 도출합니다. TDOA 프로토콜의 장점은 위치 데이터의 정확도를 유지하면서 TWR 프로토콜에 비해 디바이스의 전력 소비가 훨씬 적다는 것입니다.
이렇게 전력을 줄이면 기기의 크기를 줄일 수 있습니다. 디바이스 크기가 작아진 덕분에 벡터 T7은 견갑골 사이에 착용하거나 허리에 착용하는 등 선수의 여러 위치에서 착용할 수 있습니다.
선수 트래킹 시스템은 선수의 움직임을 측정하는 기능을 검증해야 실무자가 데이터에 대한 확신을 갖고 훈련과 경기 방식에 대한 결정을 내릴 수 있습니다. 모든 기술과 마찬가지로 제조업체는 시간이 지남에 따라 디바이스 하드웨어와 기본 알고리즘이 개선됨에 따라 업데이트된 모델을 출시할 것입니다.
새로운 모델을 도입할 때마다 새 디바이스가 측정하려는 대상(예: 위치, 속도, 가속도)을 측정할 수 있는지 확인하기 위한 검증이 필요합니다.1 이는 일반적으로 디바이스의 데이터를 기준 측정값과 비교하는 방식으로 수행됩니다. Vicon 시스템은 위치 측정의 표준으로 간주되는 모션 캡처 카메라 시스템입니다. 선수 트래킹 기술 검증 시 기준 측정값으로 Vicon을 사용하는 것이 일반적입니다.2, 3
연구에 따르면 선형 최대 노력 및 방향 전환 동작을 포함한 팀 스포츠 특정 작업 중 거리, 속도 및 가속도를 측정하는 데 Catapult T6 디바이스의 유효성을 평가했습니다.4,5,6
이 연구들은 모션 캡처 카메라 시스템(Vicon 또는 Qualisys Oqus)을 기준 측정으로 사용했으며, 모든 연구에서 Catapult T6 디바이스가 선수의 움직임을 평가하는 데 적합한 유효성을 가지고 있다고 결론지었습니다. Vector T7은 최근에야 개발되었기 때문에 이 기기에 대한 검증이 필요합니다.
따라서 이 연구의 목적은 거리, 속도, 가속도 측정을 위한 새로운 벡터 T7 디바이스의 유효성을 평가하는 것이었습니다.

2. 방법
이 연구에는 여가 활동을 즐기는 6명의 남성 참가자(28.8 ± 5.6세)가 참여했습니다. 모든 참가자는 연구 참여에 대한 서면 동의를 제공했으며, 사용된 절차는 라트로브 대학교의 인간연구윤리위원회의 승인을 받아 수행되었습니다.
데이터 수집은 농구 코트 3개로 구성된 40 x 70m 크기의 스포츠 홀에서 진행되었습니다. 참가자들은 농구 코트 중 한 곳의 20 x 5m 공간에서 7가지 동작 테스트를 수행했습니다. 시험 기간 동안 선수들의 움직임 데이터는 LPS(Catapult ClearSky, Catapult, 호주 멜버른)와 20대의 카메라로 구성된 모션 분석 시스템(Vantage, Vicon Motion Systems, 영국 옥스포드)을 통해 수집되었습니다.
각 실험에 대한 설명과 도식은 표 1과 그림 1에 나와 있습니다. 참가자들은 모든 시험을 최대 강도로 수행하고 시험이 끝날 때 완전히 정지(감속)하도록 요청받았습니다. 참가자들은 실험을 시작하기 전에 5분간 워밍업을 실시했습니다. 각 동작 시험은 각 시험마다 3분 정도의 간격을 두고 총 14회 실시되었습니다.
참가자들은 4곳의 서로 다른 위치에 4개의 벡터 T7 디바이스를 장착했습니다. 제조업체에서 제공한 조끼를 사용하여 참가자의 견갑골 사이에 디바이스 하나를 배치했습니다.
나머지 세 개의 장치는 참가자의 허리, 특히 앞쪽(두 개의 앞쪽 장골 상부 척추 사이의 중간 지점 단면), 왼쪽(앞쪽과 뒤쪽 장골 상부 척추 사이의 중간 지점 단면) 및 등(두 개의 뒤쪽 장골 상부 척추 사이의 중간 지점 단면)에 제조업체에서 제공한 맞춤형 허리 밴드 클립을 사용하여 반바지에 클립으로 부착했습니다.
이동 시험과는 별도로 고정 배치 프로토콜을 사용하여 벡터 T7 디바이스의 위치 안정성을 평가하기 위해 정적 시험을 수행했습니다. 세 대의 디바이스를 각각 삼각대(높이 1.5m)에 올려놓고 10분 동안 데이터를 수집하도록 두었습니다. 이 중 두 대는 코트 중앙에, 한 대는 코트의 넓은 가장자리에 배치했습니다.
ClearSky LPS는 스포츠 홀 주변에 설치되었으며, 지상에서 평균 8.4m 높이에 고정된 21개의 앵커 노드로 구성되었고 각 노드 간 평균 거리는 10.4m였습니다. 데이터는 10Hz로 캡처하고 제조업체 소프트웨어OpenField 버전 3.9.0)를 사용하여 처리했습니다. 속도, 가속도, x-y 위치 및 주행 거리계(누적 거리) 데이터는 추가 분석을 위해 각 시험에 대해 내보냈습니다.
기준 거리, 속도 및 가속도 측정에는 100Hz로 샘플링하는 20대의 카메라 모션 분석 시스템(Vicon)이 사용되었습니다. 카메라는 삼각대에 장착되어 움직임 실험이 수행된 영역의 경계로부터 3m 떨어진 곳에 배치되었습니다. 제조업체에서 제공한 조끼의 바깥쪽과 벡터 T7 디바이스가 들어 있는 각 허리띠 클립에 직경 32mm의 재귀 반사 마커 4개를 각 디바이스의 중앙에 대응하도록 배치했습니다.
Vicon 데이터는 Vicon Nexus 2.14로 라벨링하고 처리했습니다. 원시 Vicon 데이터의 데이터 처리는 잔류 분석을 기반으로 결정된 3Hz 차단 주파수의 4차 저역 통과 버터워스 필터를 사용한 필터링으로 이루어졌습니다. 데이터의 50밀리초 이하 간격(5개 샘플)은 스플라인 보간을 사용하여 채웠고, 50밀리초 이상의 간격은 분석에서 제외했습니다. 필터링된 100Hz Vicon 데이터의 XY 좌표가 분석에 사용되었으며, ClearSky가 2차원(2D) 위치 측정을 위해 구성되었기 때문에 z 좌표(수직 변위)는 계산에서 무시되었습니다.
각 이동 실험(n=320)에서 4개의 Vicon 마커 각각에 대해 위치 데이터를 다르게 하고 제조업체 소프트웨어에 사용된 것과 동일한 필터를 LPS 데이터에 적용하여 2D 속도를 계산했습니다. 이 정보는 제조업체에서 연구진에게 제공했지만, 제조업체의 지적 재산권으로 인해 자세한 내용은 여기에 포함되지 않았습니다. 마찬가지로 가속도는 속도 데이터와 제조업체 사양을 사용하여 필터링하여 계산했습니다.
Vicon에서 도출된 메트릭을 10Hz로 다운 샘플링한 다음 속도 신호를 교차 상관시켜 상관관계를 극대화하는 시간 오프셋을 찾아 Catapult 데이터와 동기화했습니다. 모든 데이터 처리 및 분석은 R 통계 프로그래밍 언어(버전 4.0.4)7와 gsignal 패키지8를 사용하여 수행되었습니다.
표 1. 이동 시험에 대한 설명
| 평가판 # | 설명 |
| 1 | 5m 리니어 스프린트 |
| 2 | 10m 리니어 스프린트 |
| 3 | 20m 리니어 스프린트 |
| 4 | 5m 선형 스프린트에서 45도 방향 전환으로 5m 선형 스프린트로의 전환 |
| 5 | 5m 선형 스프린트에서 90도 방향 전환으로 5m 선형 스프린트로의 전환 |
| 6 | 5m 선형 스프린트에서 180도 방향 전환으로 5m 선형 스프린트로의 전환 |
| 7 | 선형 스프린트와 방향 전환을 결합한 서킷입니다. |
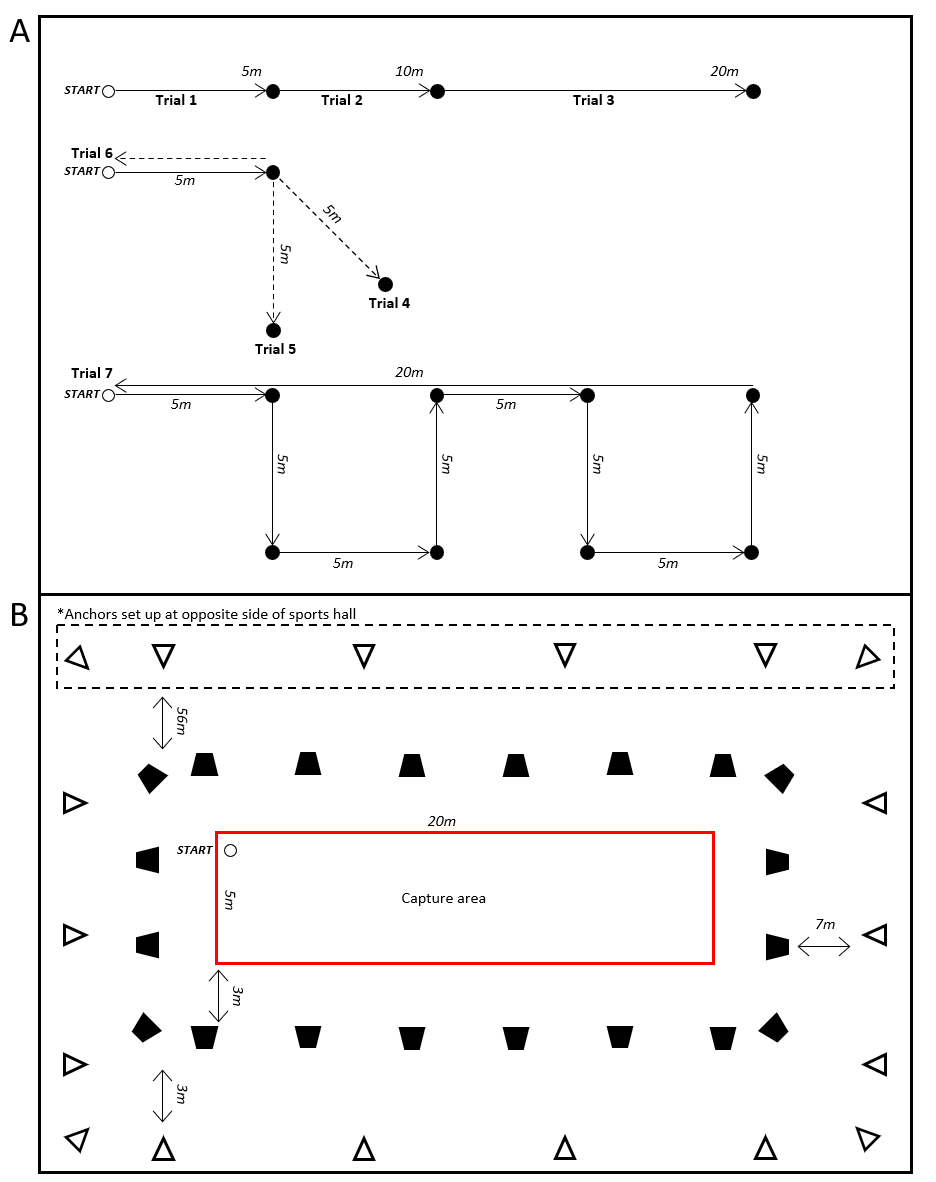
그림 1. A) 일곱 가지 이동 시험의 모식도. B) 데이터 수집 중 설정, 모든 시험은 시작 기준점(흰색 원), Vicon 카메라(검은색 사다리꼴), ClearSky 앵커 노드(흰색 삼각형)에서 시작되었습니다. 참고: 스포츠 홀 전체(명확성을 위해 40 x 70m 전체는 표시되지 않음).

3. 통계 분석
이동 평가판
속도와 가속도에 대한 평균 표준 차(RMSD), 샘플 간 위치 거리에 대한 평균 절대 차(MAD)는 각 시험에 대해 벡터 T7과 Vicon에서 도출된 데이터를 비교하여 다음과 같은 지표를 계산했습니다. 데이터에 공백이 존재하는 경우 필터링 접근법에 의한 에지 효과의 도입으로 인해 10% 이상의 누락 데이터가 있는 Vicon 시험은 분석에서 제외되었습니다(n = 12). 결과는 모든 실험에서 각 지표에 대한 평균, 중앙값, 사분위수 범위(IQR)로 표시되며 디바이스 위치 및 이동 유형별로 계층화되어 있습니다.
정적 평가판
정적 디바이스 실험의 경우 샘플 간 위치 거리와 변위가 계산되었습니다. 결과는 거리의 평균, 중앙값, IQR 및 누적 합계로 표시되며, 10분 동안의 시험에서 첫 번째 샘플부터 마지막 샘플까지의 변위는 표시되지 않습니다. 각 디바이스의 결과에는 이동 거리 계산을 위한 기준점으로 제조업체 지표인 '주행 거리계'가 포함되었습니다.
4. 결과
이동 평가판
클리어스카이 LPS와 Vicon에서 도출된 속도의 차이는 표 2와 그림 2에 나와 있습니다. 테스트한 네 가지 기기 위치 중 조끼에 착용한 기기의 평균과 중앙값이 가장 작았고, 허리 앞쪽에 착용한 기기가 가장 높았습니다.
이 관찰은 가속도의 RMSD에 대해서도 반복되었습니다(표 3 및 그림 2). 선형 이동 실험은 속도에 대해 두 방법 간에 가장 근접한 일치도를 보였습니다.1800회 방향 전환 이동 실험에서 가속도에 대한 RMSD 값이 가장 높게 나타났습니다.
표 2. 캐터펄트 장치와 Vicon 모션 분석 시스템 간의 RMSD 속도(m-s-1).
| N | 평균 | 중앙값 | IQR | ||
| 모두 | 308 | 0.19 | 0.14 | 0.11 - 0.21 | |
| 디바이스 위치 | 조끼 | 79 | 0.14 | 0.12 | 0.09 - 0.15 |
| 뒤로 | 77 | 0.20 | 0.15 | 0.12 - 0.22 | |
| 전면 | 76 | 0.24 | 0.17 | 0.14 - 0.27 | |
| 왼쪽 | 76 | 0.18 | 0.13 | 0.11 - 0.18 | |
| 이동 유형 | 리니어 | 140 | 0.17 | 0.12 | 0.09 - 0.18 |
| COD 45 | 44 | 0.27 | 0.22 | 0.14 - 0.32 | |
| COD 90 | 43 | 0.18 | 0.15 | 0.11 - 0.20 | |
| COD 180 | 48 | 0.18 | 0.14 | 0.13 - 0.17 | |
| 회로 | 33 | 0.22 | 0.18 | 0.17 - 0.24 |
표 3. 캐터펄트 장치와 Vicon 모션 분석 시스템 간의 RMSD 가속도(m-s-2).
| N | 평균 | 중앙값 | IQR | ||
| 모두 | 308 | 0.79 | 0.76 | 0.64 - 0.91 | |
| 디바이스 위치 | 조끼 | 79 | 0.75 | 0.74 | 0.62 - 0.81 |
| 뒤로 | 77 | 0.77 | 0.76 | 0.60 - 0.91 | |
| 전면 | 76 | 0.85 | 0.83 | 0.66 - 0.97 | |
| 왼쪽 | 76 | 0.79 | 0.79 | 0.65 - 0.88 | |
| 이동 유형 | 리니어 | 140 | 0.69 | 0.73 | 0.60 - 0.81 |
| COD 45 | 44 | 0.67 | 0.67 | 0.48 - 0.87 | |
| COD 90 | 43 | 0.75 | 0.74 | 0.66 - 0.85 | |
| COD 180 | 48 | 1.24 | 1.25 | 1.16 - 1.32 | |
| 회로 | 33 | 0.77 | 0.80 | 0.73 - 0.86 |
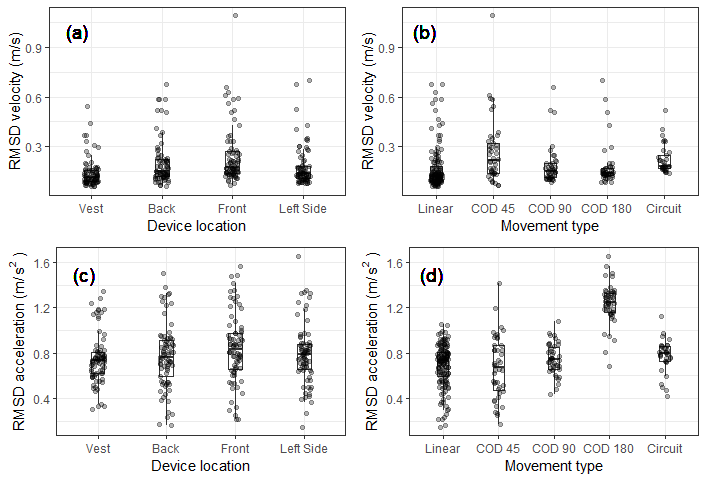
그림 2. 기기 위치(첫 번째 열) 및 이동 유형(두 번째 열)에 따라 계층화된 각 실험에 대한 RMSD 속도(첫 번째 열) 및 가속도(두 번째 열) 결과.
표 4는 벡터 T7과 Vicon 위치 추적 데이터에서 도출된 샘플 간 거리의 MAD를 보여줍니다. 모든 실험에서 평균 차이는 0.39m였으며, 허리 앞쪽에 장치를 착용한 경우와 서킷 이동 실험에서 차이가 더 컸습니다.
표 4. 캐터펄트 장치와 Vicon 모션 분석 시스템 간의 샘플 간 거리(m)의 MAD.
| N | 평균 | 중앙값 | IQR | ||
| 모두 | 308 | 0.04 | 0.03 | 0.02 - 0.05 | |
| 디바이스 위치 | 조끼 | 79 | 0.03 | 0.03 | 0.02 - 0.04 |
| 뒤로 | 77 | 0.04 | 0.03 | 0.02 - 0.04 | |
| 전면 | 76 | 0.05 | 0.04 | 0.03 - 0.06 | |
| 왼쪽 | 76 | 0.04 | 0.03 | 0.03 - 0.04 | |
| 이동 유형 | 리니어 | 140 | 0.03 | 0.03 | 0.02 - 0.04 |
| COD 45 | 44 | 0.04 | 0.04 | 0.03 - 0.05 | |
| COD 90 | 43 | 0.04 | 0.03 | 0.03 - 0.04 | |
| COD 180 | 48 | 0.04 | 0.03 | 0.03 - 0.04 | |
| 회로 | 33 | 0.07 | 0.06 | 0.05 - 0.09 |
정적 평가판
모든 고정 디바이스의 중앙값과 IQR 샘플 간 거리는 0이었으며(표 5), 이는 대부분의 시간 간격에서 디바이스가 x 또는 y 좌표를 변경하지 않았음을 나타냅니다.
그러나 기기의 위치는 약간의 변화를 기록하여 샘플 사이의 평균 거리가 약 1-2mm 정도였습니다. 10분 동안 강한 방향 편향은 없었으며, 디바이스의 최종 위치는 초기 위치에 매우 근접했습니다(최종 변위는 수 센티미터 정도).
제조업체의 누적 거리('주행 거리계' 변수) 계산에 포함된 독점적인 데이터 처리 및 필터링은 위치의 작은 변화를 보정하여 0.02m 미만의 총 거리를 반환할 수 있었습니다.
표 5. 정적 시험 결과(세 대의 기기를 10분 동안 고정된 상태로 두었습니다).
| x, y 위치에서 파생 | |||||
| 연속 샘플 사이의 거리(m) | 최종 샘플에서의 변위(m) | 최종 샘플의 주행 거리계(m) | |||
| 장치 | 평균 | 중앙값 | IQR | ||
| 모두 | 0.001898 | 0 | 0 - 0 | ||
| 1 | 0.001644 | 0 | 0 - 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 - 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 - 0 | (-0.06, -0.05) | 0.01 |
5. 요약
- 벡터 T7 디바이스는 속도 및 가속도 측정 시에는 RMSD가 낮았고, 가속, 감속 및 방향 전환이 많은 움직임 시험 시에는 거리 측정 시에는 MAD가 낮았습니다.
- 벡터 T7 디바이스는 RMSD가 약간 더 높은 180도 방향 전환을 제외한 모든 동작에서 가속도 측정에 대해 비슷한 낮은 RMSD를 보였습니다. 이는 이 실험에서 가속/감속 속도가 더 높은 움직임이 포함되었기 때문일 수 있으며, 속도 변화율이 증가함에 따라 오차가 증가함을 시사합니다. 그러나 이 오차는 여전히 낮은 것으로 간주할 수 있습니다(평균 RMSD 1.24).
- 속도, 가속도 및 거리 측정에서 조끼를 착용했을 때 오차가 가장 낮았고, 장치를 허리 앞쪽에 착용했을 때 오차가 가장 컸습니다. 장치 위치에 관계없이 모든 위치에서 모든 측정값의 오차가 0.85 이하로 낮았습니다.
- 정지 상태에서의 벡터 T7 디바이스의 위치 안정성은 샘플 간 평균 거리가 ~1~2mm로 높았습니다.
- 오차가 적다는 것은 클리어스카이와 함께 사용되는 벡터 T7 디바이스가 선형 최대 노력과 방향 전환을 포함한 팀 스포츠 특정 작업에서 속도, 가속도, 거리를 유효하게 측정할 수 있다는 것을 의미합니다.
6. 참고 자료
- Malone, J. J., Lovell, R., Varley, M. C., & Coutts, A. J. (2017). 블랙 박스 풀기 : 스포츠에서 GPS 장치 사용을위한 응용 프로그램 및 고려 사항. 국제 스포츠 생리학 및 성능 저널, 12(s2), S2-18.
- Linke, D., Link, D., & Lames, M. (2018). 현장 조건에서 전자 성능 및 추적 시스템 EPTS의 검증. PloS one, 13(7), e0199519.
- Linke, D., Link, D., & Lames, M. (2020). TRACAB의 광학 비디오 추적 시스템의 축구 관련 유효성. 플로스 원, 15(3), e0230179.
- Luteberget, L. S., Spencer, M., & Gilgien, M. (2018). 실내 조건에서 팀 스포츠 특정 훈련을 위한 캐터펄트 클리어스카이 T6 로컬 포지셔닝 시스템의 유효성. 생리학의 프론티어, 9, 115.
- Serpiello, F. R., Hopkins, W. G., Barnes, S., Tavrou, J., Duthie, G. M., Aughey, R. J., & Ball, K. (2018). 실내 스포츠에서 운동성을 측정하기 위한 초광대역 로컬 포지셔닝 시스템의 유효성. 스포츠 과학 저널, 36(15), 1727-1733.
- Hodder, R. W., Ball, K. A., & Serpiello, F. R. (2020). 장치 간 거리 측정을위한 Catapult ClearSky T6 로컬 포지셔닝 시스템의 기준 유효성. Sensors, 20(13), 3693.
- R 코어 팀 (2021). R: 통계 컴퓨팅을 위한 언어 및 환경. 통계 컴퓨팅을 위한 R 재단, 오스트리아 비엔나. URL https://www.R-project.org/
- Van Boxtel, G.J.M., Laboissière, R., & Wilhelm, H.D. (2021). gsignal: 신호 처리. URL: https://github.com/gjmvanboxtel/gsignal