เอกสารไวท์เปเปอร์: เวกเตอร์การตรวจสอบ T7
Matthew C. Varley, Susanne Ellens, David Carey กลุ่มวิจัยด้านกีฬา ประสิทธิภาพการทำงาน และโภชนาการ คณะสาธารณสุขศาสตร์ บริการสังคม และกีฬา มหาวิทยาลัย La Trobe เมลเบิร์น รัฐวิกตอเรีย ออสเตรเลีย
1. บทนำ
ระบบติดตามนักกีฬาได้กลายมาเป็นเครื่องมือสำคัญสำหรับกีฬา ระบบเหล่านี้ช่วยให้ผู้ฝึกสามารถวัดและวิเคราะห์การเคลื่อนไหวของนักกีฬาได้ เพื่อทำความเข้าใจภาระการฝึก ประสิทธิภาพทางกาย พฤติกรรมทางยุทธวิธี และความเสี่ยง ต่อ การบาดเจ็บได้ดีขึ้น
แม้ว่าจะมีระบบติดตามมากมายให้เลือกใช้ แต่ส่วนใหญ่มีข้อจำกัดเมื่อใช้ในอาคาร ระบบระบุตำแหน่งในพื้นที่ ClearSky ( LPS ) เป็นเทคโนโลยีที่ติดตามและวัดประสิทธิภาพของนักกีฬาในสภาพแวดล้อมในร่ม โดยเฉพาะอย่างยิ่ง ระบบจะแสดงผลตำแหน่งและเมตริกที่ได้จากตำแหน่ง เช่น ระยะทาง ความเร็ว และความเร่ง
Vector T7 เป็นอุปกรณ์สวมใส่ชนิดใหม่ที่ใช้ร่วมกับระบบ ClearSky โดย Vector T7 มีลักษณะคล้ายกับอุปกรณ์รุ่นก่อนหน้าที่ใช้ร่วมกับ ClearSky (Vector S7 และ Catapult T6) โดยมีความถี่ในการสุ่มตัวอย่าง 10 Hz
อย่างไรก็ตาม Vector T7 ใช้โปรโตคอล Time Difference of Arrival (TDOA) เพื่อระบุตำแหน่ง ในขณะที่อุปกรณ์รุ่นก่อนหน้าใช้โปรโตคอล Two Way Ranging (TWR) ข้อดีของโปรโตคอล TDOA คือต้องใช้พลังงานน้อยกว่ามากสำหรับอุปกรณ์เมื่อเทียบกับโปรโตคอล TWR ในขณะที่ยังคงรักษาความแม่นยำของข้อมูลตำแหน่งไว้ได้
การลดพลังงานนี้ทำให้สามารถย่อขนาดอุปกรณ์ลงได้ ขนาดอุปกรณ์ที่เล็กลงทำให้สามารถสวม Vector T7 ได้หลายตำแหน่งบนตัวนักกีฬา รวมถึงตำแหน่งระหว่างสะบักหรือบริเวณเอว
ระบบติดตามนักกีฬาต้องได้รับการตรวจสอบความสามารถในการวัดการเคลื่อนไหวของนักกีฬาเพื่อให้ผู้ฝึกมีความมั่นใจกับข้อมูล ซึ่งช่วยให้พวกเขาตัดสินใจเกี่ยวกับการฝึกซ้อมและการแข่งขันได้ เช่นเดียวกับเทคโนโลยีทั้งหมด ผู้ผลิตจะปล่อยรุ่นที่อัปเดตเมื่อเวลาผ่านไป เมื่อมีการปรับปรุงทั้งฮาร์ดแวร์ของอุปกรณ์และอัลกอริทึมพื้นฐาน
แบบจำลองใหม่แต่ละแบบต้องมีการตรวจสอบเพื่อกำหนดความสามารถของอุปกรณ์ใหม่ในการวัดสิ่งที่ตั้งใจจะวัด (เช่น ตำแหน่ง ความเร็ว และความเร่ง) 1 โดยทั่วไปจะทำโดยการเปรียบเทียบข้อมูลจากอุปกรณ์กับการวัดเกณฑ์ ระบบ Vicon เป็นระบบกล้องจับการเคลื่อนไหวที่ถือเป็นมาตรฐานทองคำในการวัดตำแหน่ง โดยทั่วไป Vicon จะถูกใช้เป็นการวัดเกณฑ์ในการตรวจสอบเทคโนโลยีการติดตามนักกีฬา 2, 3
การศึกษาวิจัยได้ประเมินความถูกต้องของอุปกรณ์ Catapult T6 ในการวัดระยะทาง ความเร็ว และความเร่งระหว่างงานเฉพาะกีฬาประเภททีม รวมถึงความพยายามสูงสุดเชิงเส้นและการเคลื่อนไหวเปลี่ยนทิศทาง 4,5,6
การศึกษาวิจัยเหล่านี้ใช้ระบบกล้องจับการเคลื่อนไหว (Vicon หรือ Qualisys Oqus) เป็นเกณฑ์ในการวัดผล โดยการศึกษาวิจัยทั้งหมดสรุปว่าอุปกรณ์ Catapult T6 มีประสิทธิภาพในการประเมินการเคลื่อนไหวของนักกีฬาที่ยอมรับได้ เนื่องจาก Vector T7 เพิ่งได้รับการพัฒนาเมื่อไม่นานนี้ จึงจำเป็นต้องมีการตรวจสอบอุปกรณ์นี้
ดังนั้น จุดประสงค์ของการศึกษาครั้งนี้คือเพื่อประเมินความถูกต้องของอุปกรณ์ Vector T7 ใหม่ในการวัดระยะทาง ความเร็ว และความเร่ง
→ ดาวน์โหลด Vector T7 White Paper นี้ได้โดยคลิกที่นี่

2. วิธีการ
ผู้เข้าร่วมการศึกษาชาย 6 ราย (อายุ 28.8 ± 5.6 ปี) เข้าร่วมการศึกษานี้ ผู้เข้าร่วมทั้งหมดให้ความยินยอมเป็นลายลักษณ์อักษรในการเข้าร่วมการศึกษา และขั้นตอนที่ใช้ดำเนินการได้รับการอนุมัติจากคณะกรรมการจริยธรรมการวิจัยในมนุษย์ของมหาวิทยาลัย La Trobe
การรวบรวมข้อมูลดำเนินการในห้องโถงกีฬาขนาด 40 x 70 ม. ซึ่งประกอบด้วยสนามบาสเกตบอล 3 สนาม ผู้เข้าร่วมการทดลองทำการทดลองการเคลื่อนไหว 7 แบบในพื้นที่ 20 x 5 ม. ในสนามบาสเกตบอลแห่งหนึ่ง ระหว่างการทดลอง ได้มีการรวบรวมข้อมูลการเคลื่อนไหวของผู้เล่นผ่าน LPS (Catapult ClearSky, Catapult, เมลเบิร์น ออสเตรเลีย) และระบบวิเคราะห์การเคลื่อนไหวด้วยกล้อง 20 ตัว (Vantage, Vicon Motion Systems, Oxford, สหราชอาณาจักร)
คำอธิบายและแผนผังของการทดสอบแต่ละครั้งแสดงอยู่ใน ตารางที่ 1 และรูปที่ 1 ผู้เข้าร่วมถูกขอให้ทำการทดสอบทั้งหมดด้วยความเข้มข้นสูงสุดและหยุดให้สนิทเมื่อสิ้นสุดการทดสอบ (ลดความเร็ว) ผู้เข้าร่วมวอร์มอัพ 5 นาทีก่อนเริ่มการทดสอบ การทดสอบการเคลื่อนไหวแต่ละครั้งดำเนินการสองครั้ง รวมเป็น 14 ครั้ง โดยแต่ละครั้งห่างกันประมาณ 3 นาที
ผู้เข้าร่วมได้รับอุปกรณ์ Vector T7 จำนวน 4 ชิ้น โดยวางใน 4 ตำแหน่งที่แตกต่างกัน อุปกรณ์ชิ้นหนึ่งวางอยู่ระหว่างสะบักของผู้เข้าร่วมโดยใช้เสื้อกั๊กที่ผู้ผลิตจัดเตรียมไว้ให้
อุปกรณ์ที่เหลืออีกสามชิ้นถูกวางไว้รอบเอวของผู้เข้าร่วมโดยเฉพาะที่ด้านหน้า (ส่วนตัดขวางของจุดกึ่งกลางระหว่างกระดูกสันหลังอุ้งเชิงกรานบนด้านหน้าสองอัน) ด้านซ้าย (ส่วนตัดขวางของจุดกึ่งกลางระหว่างกระดูกสันหลังอุ้งเชิงกรานบนด้านหน้าและด้านหลัง) และด้านหลัง (ส่วนตัดขวางของจุดกึ่งกลางระหว่างกระดูกสันหลังอุ้งเชิงกรานบนด้านหลังสองอัน) ในคลิปขอบเอวแบบพิเศษที่จัดหาโดยผู้ผลิต ซึ่งติดไว้กับกางเกงขาสั้นของผู้เข้าร่วม
นอกเหนือไปจากการทดสอบการเคลื่อนไหวแล้ว ยังมีการทดสอบแบบคงที่เพื่อประเมินอุปกรณ์ Vector T7 ในด้านความเสถียรของตำแหน่งโดยใช้โปรโตคอลการวางตำแหน่งคงที่ โดยวางอุปกรณ์สามชิ้นบนขาตั้งสามขา (สูง 1.5 เมตร) และปล่อยทิ้งไว้เพื่อรวบรวมข้อมูลเป็นเวลา 10 นาที โดยวางอุปกรณ์สองชิ้นไว้ตรงกลางสนามกลาง และอีกชิ้นหนึ่งวางไว้ที่ขอบกว้างของสนาม
ClearSky LPS ได้รับการติดตั้งรอบ ๆ ห้องโถงกีฬาและประกอบด้วยจุดยึด 21 จุดที่ติดตั้งไว้ที่ความสูงเฉลี่ย 8.4 เมตรจากพื้น โดยมีระยะห่างเฉลี่ยระหว่างจุดยึดแต่ละจุด 10.4 เมตร ข้อมูลถูกบันทึกที่ความถี่ 10 เฮิรตซ์และประมวลผลโดยใช้ซอฟต์แวร์ของผู้ผลิต ( OpenField (เวอร์ชัน 3.9.0) ข้อมูลความเร็ว ความเร่ง ตำแหน่ง xy และมาตรวัดระยะทาง (ระยะทางสะสม) ถูกส่งออกสำหรับการทดลองแต่ละครั้งเพื่อการวิเคราะห์เพิ่มเติม
ระบบวิเคราะห์การเคลื่อนไหวด้วยกล้อง 20 ตัว (Vicon) ที่ความถี่ 100 เฮิรตซ์ ถูกใช้เป็นเกณฑ์ในการวัดระยะทาง ความเร็ว และความเร่ง กล้องติดตั้งบนขาตั้งและวางห่างจากขอบเขตพื้นที่ที่ทดสอบการเคลื่อนไหว 3 เมตร เครื่องหมายสะท้อนแสงสี่อันที่มีเส้นผ่านศูนย์กลาง 32 มม. ถูกวางไว้ด้านนอกเสื้อกั๊กที่ผู้ผลิตจัดหามาให้และคลิปขอบเอวแต่ละอันที่มีอุปกรณ์ Vector T7 โดยให้ตรงกับตรงกลางของอุปกรณ์แต่ละตัว
ข้อมูล Vicon ถูกติดฉลากและประมวลผลด้วย Vicon Nexus 2.14 การประมวลผลข้อมูลดิบของ Vicon ประกอบด้วยการกรองโดยใช้ฟิลเตอร์ Butterworth โลว์พาสลำดับที่สี่ที่มีความถี่ตัดขาด 3Hz ซึ่งกำหนดขึ้นโดยอิงจากการวิเคราะห์ค่าคงเหลือ ช่องว่างในข้อมูล ≤50 มิลลิวินาที (5 ตัวอย่าง) ถูกเติมเต็มโดยใช้การสอดแทรกสไปน์ ช่องว่าง ≥50 มิลลิวินาทีถูกแยกออกจากการวิเคราะห์ พิกัด XY ของข้อมูล Vicon 100 Hz ที่กรองแล้วถูกใช้สำหรับการวิเคราะห์ พิกัด z (การเคลื่อนตัวในแนวตั้ง) ถูกละเลยในการคำนวณ เนื่องจาก ClearSky ถูกกำหนดค่าสำหรับการวางตำแหน่งสองมิติ (2D)
สำหรับเครื่องหมาย Vicon ทั้งสี่ตัวในการทดสอบการเคลื่อนไหวแต่ละครั้ง (n=320) ความเร็ว 2 มิติจะคำนวณโดยหาค่าความแตกต่างของข้อมูลตำแหน่งและใช้ตัวกรองเดียวกันที่ใช้ในซอฟต์แวร์ของผู้ผลิตกับข้อมูล LPS ผู้ผลิตเป็นผู้ให้ข้อมูลนี้แก่ผู้วิจัย อย่างไรก็ตาม รายละเอียดไม่ได้รวมไว้ที่นี่เนื่องจากเป็นทรัพย์สินทางปัญญาของผู้ผลิต ในทำนองเดียวกัน อัตราเร่งจะคำนวณโดยหาค่าความแตกต่างของข้อมูลความเร็วและกรองโดยใช้ข้อมูลจำเพาะของผู้ผลิต
เมตริกที่ได้จาก Vicon ถูกสุ่มตัวอย่างลงมาที่ความถี่ 10Hz จากนั้นจึงซิงโครไนซ์กับข้อมูลของ Catapult โดยทำการหาค่าสัมพันธ์แบบไขว้ของสัญญาณความเร็วเพื่อหาค่าชดเชยเวลาที่เพิ่มค่าสัมพันธ์ให้สูงสุด การประมวลผลและวิเคราะห์ข้อมูลทั้งหมดดำเนินการโดยใช้ภาษาโปรแกรมสถิติ R (เวอร์ชัน 4.0.4) 7 และแพ็กเกจ gsignal 8
ตารางที่ 1 คำอธิบายการทดลองเคลื่อนไหว
| การทดลอง # | คำอธิบาย |
| 1 | วิ่งสปรินต์เชิงเส้น 5 เมตร |
| 2 | วิ่งสปรินต์เชิงเส้น 10 เมตร |
| 3 | วิ่งสปรินต์เชิงเส้น 20 เมตร |
| 4 | วิ่งแบบสปรินต์เชิงเส้น 5 เมตรเป็นมุม 45 องศา เปลี่ยนทิศทางเป็นวิ่งแบบสปรินต์เชิงเส้น 5 เมตร |
| 5 | วิ่งแบบสปรินต์เชิงเส้น 5 เมตรเป็นมุม 90 องศา เปลี่ยนทิศทางเป็นวิ่งแบบสปรินต์เชิงเส้น 5 เมตร |
| 6 | วิ่งแบบสปรินต์เชิงเส้น 5 เมตรเป็นมุม 180 องศา เปลี่ยนทิศทางเป็นวิ่งแบบสปรินต์เชิงเส้น 5 เมตร |
| 7 | วงจรที่เกี่ยวข้องกับการผสมผสานของการวิ่งแบบเส้นตรงและการเปลี่ยนทิศทาง |
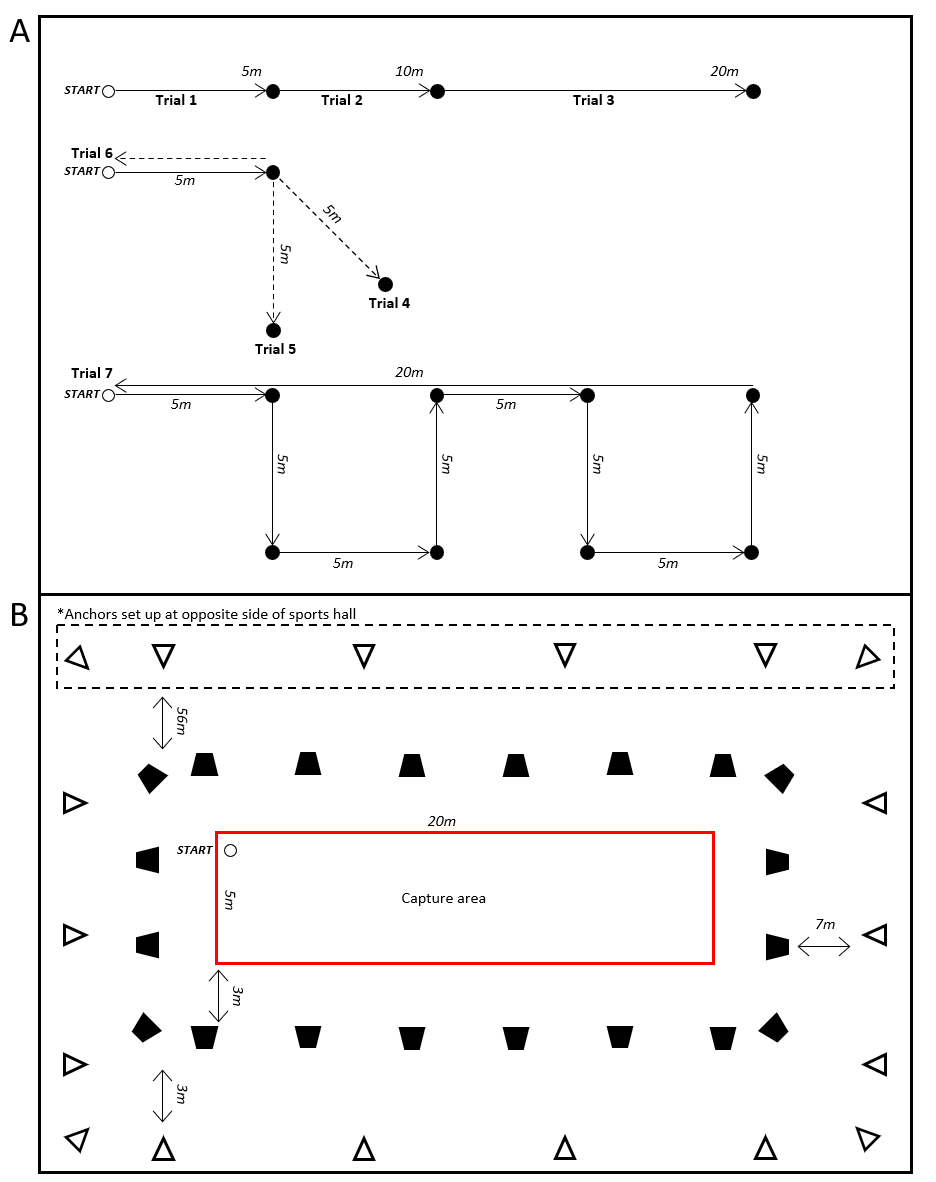
รูปที่ 1 ก) แผนผังของการทดสอบการเคลื่อนไหว 7 แบบที่แตกต่างกัน ข) การตั้งค่าระหว่างการรวบรวมข้อมูล การทดสอบทั้งหมดเริ่มต้นจากจุดอ้างอิงเริ่มต้น (วงกลมสีขาว) กล้อง Vicon (สี่เหลี่ยมคางหมูสีดำ) โหนดยึด ClearSky (สามเหลี่ยมสีขาว) หมายเหตุ: ห้องโถงกีฬาทั้งหมด (ขนาด 40 x 70 ม. ไม่แสดงแบบเต็มเพื่อความชัดเจน)
→ ดาวน์โหลด Vector T7 White Paper นี้ได้โดยคลิกที่นี่

3. การวิเคราะห์เชิงสถิติ
การทดสอบการเคลื่อนไหว
มีการคำนวณเมตริกต่อไปนี้สำหรับการทดลองแต่ละครั้งโดยเปรียบเทียบข้อมูลที่ได้จาก Vector T7 และ Vicon ได้แก่ ค่ารากของค่าความแตกต่างมาตรฐานเฉลี่ย (RMSD) สำหรับความเร็วและความเร่ง และค่าความแตกต่างสัมบูรณ์เฉลี่ย (MAD) สำหรับระยะห่างระหว่างตัวอย่างต่อตัวอย่าง การทดลอง Vicon ที่มีข้อมูลที่ขาดหายไปมากกว่า 10% จะถูกแยกออกจากการวิเคราะห์ (n = 12) เนื่องจากมีการใช้เอฟเฟกต์ขอบโดยวิธีการกรองข้อมูลซึ่งมีช่องว่างในข้อมูล ผลลัพธ์จะแสดงเป็นค่าเฉลี่ย ค่ามัธยฐาน และช่วงควอร์ไทล์ (IQR) สำหรับเมตริกแต่ละตัว ในทุกการทดลอง และแบ่งชั้นตามตำแหน่งอุปกรณ์และประเภทการเคลื่อนที่
การทดลองแบบคงที่
สำหรับการทดสอบอุปกรณ์แบบคงที่ ระยะทางและการเคลื่อนที่จากตัวอย่างหนึ่งไปยังอีกตัวอย่างหนึ่งจะถูกคำนวณ ผลลัพธ์จะแสดงเป็นค่าเฉลี่ย ค่ามัธยฐาน IQR และผลรวมสะสมสำหรับระยะทาง และการเคลื่อนที่จากตัวอย่างแรกไปยังตัวอย่างสุดท้ายในการทดสอบ 10 นาที "มาตรวัดระยะทาง" ของผู้ผลิตจะถูกรวมไว้ในผลลัพธ์สำหรับอุปกรณ์แต่ละชิ้นเพื่อใช้เป็นจุดอ้างอิงสำหรับระยะทางที่เคลื่อนที่ได้ซึ่งคำนวณได้
4. ผลลัพธ์
การทดสอบการเคลื่อนไหว
ความแตกต่างระหว่างความเร็วที่ได้จาก ClearSky LPS และ Vicon แสดงอยู่ใน ตารางที่ 2 และรูปที่ 2 จากตำแหน่งอุปกรณ์ทั้งสี่ตำแหน่งที่ทดสอบ อุปกรณ์ที่สวมไว้ในเสื้อกั๊กมีค่าเฉลี่ยและค่ามัธยฐานของ RMSD น้อยที่สุด และอุปกรณ์ที่สวมไว้ที่ส่วนหน้าของเอวจะมีค่าสูงสุด
สังเกตซ้ำนี้สำหรับค่า RMSD ในการเร่งความเร็ว ( ตาราง 3 และรูปที่ 2 ) การทดสอบการเคลื่อนที่เชิงเส้นมีค่าความสอดคล้องกันที่ใกล้เคียงที่สุดระหว่างวิธีการต่างๆ สำหรับความเร็ว การทดสอบการเคลื่อนที่โดยเปลี่ยนทิศทาง 180 องศา ทำให้ได้ค่า RMSD สูงสุดสำหรับการเร่งความเร็ว
ตารางที่ 2 ความเร็ว RMSD (m·s -1 ) ระหว่างอุปกรณ์ Catapult และระบบวิเคราะห์การเคลื่อนที่ของ Vicon
| เอ็น | หมายถึง | มัธยฐาน | ไอคิวอาร์ | ||
| ทั้งหมด | 308 | 0.19 | 0.14 | 0.11 – 0.21 | |
| ตำแหน่งอุปกรณ์ | เสื้อกั๊ก | 79 | 0.14 | 0.12 | 0.09 – 0.15 |
| กลับ | 77 | 0.20 | 0.15 | 0.12 – 0.22 | |
| ด้านหน้า | 76 | 0.24 | 0.17 | 0.14 – 0.27 | |
| ด้านซ้าย | 76 | 0.18 | 0.13 | 0.11 – 0.18 | |
| ประเภทการเคลื่อนไหว | เชิงเส้น | 140 | 0.17 | 0.12 | 0.09 – 0.18 |
| COD 45 | 44 | 0.27 | 0.22 | 0.14 – 0.32 | |
| COD 90 | 43 | 0.18 | 0.15 | 0.11 – 0.20 | |
| COD 180 | 48 | 0.18 | 0.14 | 0.13 – 0.17 | |
| วงจรไฟฟ้า | 33 | 0.22 | 0.18 | 0.17 – 0.24 |
ตารางที่ 3 ค่าความเร่ง RMSD (m·s -2 ) ระหว่างอุปกรณ์ Catapult และระบบวิเคราะห์การเคลื่อนที่ของ Vicon
| เอ็น | หมายถึง | มัธยฐาน | ไอคิวอาร์ | ||
| ทั้งหมด | 308 | 0.79 | 0.76 | 0.64 – 0.91 | |
| ตำแหน่งอุปกรณ์ | เสื้อกั๊ก | 79 | 0.75 | 0.74 | 0.62 – 0.81 |
| กลับ | 77 | 0.77 | 0.76 | 0.60 – 0.91 | |
| ด้านหน้า | 76 | 0.85 | 0.83 | 0.66 – 0.97 | |
| ด้านซ้าย | 76 | 0.79 | 0.79 | 0.65 – 0.88 | |
| ประเภทการเคลื่อนไหว | เชิงเส้น | 140 | 0.69 | 0.73 | 0.60 – 0.81 |
| COD 45 | 44 | 0.67 | 0.67 | 0.48 – 0.87 | |
| COD 90 | 43 | 0.75 | 0.74 | 0.66 – 0.85 | |
| COD 180 | 48 | 1.24 | 1.25 | 1.16 – 1.32 | |
| วงจรไฟฟ้า | 33 | 0.77 | 0.80 | 0.73 – 0.86 |
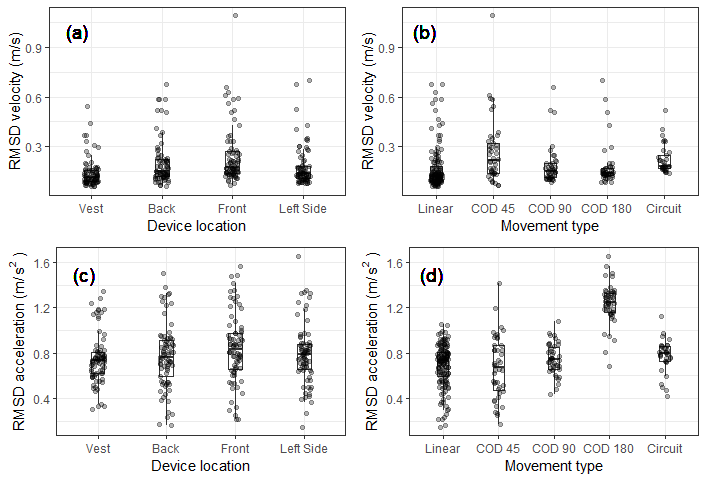
รูปที่ 2 ผลลัพธ์ความเร็ว RMSD (แถวแรก) และความเร่ง (แถวที่สอง) สำหรับการทดลองแต่ละครั้ง แบ่งตามตำแหน่งอุปกรณ์ (คอลัมน์แรก) และประเภทการเคลื่อนไหว (คอลัมน์ที่สอง)
ตารางที่ 4 แสดงค่า MAD ในระยะห่างระหว่างตัวอย่างที่ได้จากข้อมูลการติดตามตำแหน่งของ Vector T7 และ Vicon จากการทดลองทั้งหมด พบว่าค่าความแตกต่างเฉลี่ยอยู่ที่ 0.39 ม. โดยค่าความแตกต่างจะมากกว่าในอุปกรณ์ที่สวมใส่บริเวณเอวด้านหน้า และระหว่างการทดลองเคลื่อนไหววงจร
ตารางที่ 4 MAD ในระยะห่างระหว่างตัวอย่างต่อตัวอย่าง (ม.) ระหว่างอุปกรณ์ Catapult และระบบวิเคราะห์การเคลื่อนที่ของ Vicon
| เอ็น | หมายถึง | มัธยฐาน | ไอคิวอาร์ | ||
| ทั้งหมด | 308 | 0.04 | 0.03 | 0.02 – 0.05 | |
| ตำแหน่งอุปกรณ์ | เสื้อกั๊ก | 79 | 0.03 | 0.03 | 0.02 – 0.04 |
| กลับ | 77 | 0.04 | 0.03 | 0.02 – 0.04 | |
| ด้านหน้า | 76 | 0.05 | 0.04 | 0.03 – 0.06 | |
| ด้านซ้าย | 76 | 0.04 | 0.03 | 0.03 – 0.04 | |
| ประเภทการเคลื่อนไหว | เชิงเส้น | 140 | 0.03 | 0.03 | 0.02 – 0.04 |
| COD 45 | 44 | 0.04 | 0.04 | 0.03 – 0.05 | |
| COD 90 | 43 | 0.04 | 0.03 | 0.03 – 0.04 | |
| COD 180 | 48 | 0.04 | 0.03 | 0.03 – 0.04 | |
| วงจรไฟฟ้า | 33 | 0.07 | 0.06 | 0.05 – 0.09 |
การทดลองแบบคงที่
ค่ามัธยฐานและระยะห่างระหว่างตัวอย่าง IQR สำหรับอุปกรณ์คงที่ทั้งหมดคือศูนย์ ( ตารางที่ 5 ) ซึ่งบ่งชี้ว่าในช่วงเวลาส่วนใหญ่ อุปกรณ์จะไม่เปลี่ยนพิกัด x หรือ y
อย่างไรก็ตาม อุปกรณ์ได้บันทึกการเปลี่ยนแปลงตำแหน่งบางส่วนไว้ โดยระยะห่างเฉลี่ยระหว่างตัวอย่างอยู่ที่ประมาณ 1-2 มม. เมื่อเวลาผ่านไปกว่า 10 นาที ไม่มีความลำเอียงในทิศทางที่ชัดเจน และตำแหน่งสุดท้ายของอุปกรณ์นั้นใกล้เคียงกับตำแหน่งเริ่มต้นมาก (การเคลื่อนตัวครั้งสุดท้ายอยู่ที่ประมาณไม่กี่เซนติเมตร)
การประมวลผลและการกรองข้อมูลที่เป็นกรรมสิทธิ์ซึ่งรวมอยู่ในคำนวณระยะทางสะสมของผู้ผลิต (ตัวแปร 'มาตรวัดระยะทาง') สามารถแก้ไขการเปลี่ยนแปลงเล็กน้อยในตำแหน่งได้ และส่งคืนระยะทางรวมน้อยกว่า 0.02 ม.
ตารางที่ 5 ผลการทดสอบแบบคงที่ (วางอุปกรณ์ 3 ชิ้นทิ้งไว้เป็นเวลา 10 นาที)
| ได้มาจากตำแหน่ง x, y | |||||
| ระยะห่างระหว่างตัวอย่างที่ต่อเนื่องกัน (ม.) | การเคลื่อนที่ที่ตัวอย่างสุดท้าย (ม.) | มาตรวัดระยะทางที่ตัวอย่างสุดท้าย (ม.) | |||
| อุปกรณ์ | หมายถึง | มัธยฐาน | ไอคิวอาร์ | ||
| ทั้งหมด | 0.001898 | 0 | 0 – 0 | ||
| 1 | 0.001644 | 0 | 0 – 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 – 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 – 0 | (-0.06, -0.05) | 0.01 |
→ ดาวน์โหลด Vector T7 White Paper นี้ได้โดยคลิกที่นี่
5. สรุป
- อุปกรณ์ เวกเตอร์ T7 มีค่า RMSD ต่ำสำหรับการวัดความเร็วและความเร่ง และมีค่า MAD ต่ำสำหรับการวัดระยะทางระหว่างการทดสอบการเคลื่อนไหวที่เกี่ยวข้องกับอัตราการเร่ง การลดความเร็ว และการเปลี่ยนทิศทางที่สูง
- อุปกรณ์ Vector T7 แสดงค่า RMSD ต่ำที่คล้ายคลึงกันสำหรับการวัดความเร่งในการทดสอบการเคลื่อนไหวทั้งหมด ยกเว้นการเปลี่ยนทิศทาง 180 องศา ซึ่งค่า RMSD สูงกว่าเล็กน้อย ซึ่งอาจเป็นผลมาจากการเคลื่อนไหวในการทดสอบนี้ซึ่งเกี่ยวข้องกับอัตราการเร่ง/ลดความเร็วที่สูงขึ้น และบ่งชี้ว่าข้อผิดพลาดจะเพิ่มขึ้นเมื่ออัตราการเปลี่ยนแปลงความเร็วเพิ่มขึ้น อย่างไรก็ตาม ข้อผิดพลาดนี้ยังคงถือว่าต่ำ (ค่า RMSD เฉลี่ยอยู่ที่ 1.24)
- การวางเสื้อกั๊กส่งผลให้มีข้อผิดพลาดน้อยที่สุดในการวัดความเร็ว ความเร่ง และระยะทาง ในขณะที่การวางอุปกรณ์ไว้ที่ด้านหน้าเอวส่งผลให้มีข้อผิดพลาดสูงสุด ไม่ว่าจะวางอุปกรณ์ไว้ที่ใด ตำแหน่งทั้งหมดส่งผลให้มีข้อผิดพลาดต่ำในทุกการวัด โดยมีค่า RMSD ≤ 0.85
- เสถียรภาพตำแหน่งของอุปกรณ์ Vector T7 เมื่ออยู่นิ่งอยู่ในระดับสูง โดยมีระยะห่างเฉลี่ยระหว่างตัวอย่างประมาณ 1-2 มม.
- ข้อผิดพลาดต่ำแสดงให้เห็นว่าอุปกรณ์ Vector T7 ที่ใช้ร่วมกับ ClearSky ช่วยให้สามารถวัดความเร็ว ความเร่ง และระยะทางได้อย่างถูกต้องในระหว่างภารกิจเฉพาะกีฬาประเภททีม รวมถึงความพยายามสูงสุดเชิงเส้นและการเคลื่อนไหวเปลี่ยนทิศทาง
→ ดาวน์โหลด Vector T7 White Paper นี้ได้โดยคลิกที่นี่
6. เอกสารอ้างอิง
- Malone, JJ, Lovell, R., Varley, MC, & Coutts, AJ (2017). แกะกล่องดำ: แอปพลิเคชันและข้อควรพิจารณาในการใช้อุปกรณ์ GPS ในกีฬา วารสารนานาชาติว่าด้วยสรีรวิทยาและประสิทธิภาพการกีฬา 12(s2), S2-18
- Linke, D., Link, D. และ Lames, M. (2018). การตรวจสอบประสิทธิภาพอิเล็กทรอนิกส์และระบบติดตาม EPTS ภายใต้เงื่อนไขภาคสนาม PloS one , 13(7), e0199519
- Linke, D., Link, D. และ Lames, M. (2020). ความถูกต้องเฉพาะของฟุตบอลในระบบติดตามวิดีโอแบบออปติคัลของ TRACAB PloS one , 15(3), e0230179
- Luteberget, LS, Spencer, M. และ Gilgien, M. (2018). ความถูกต้องของระบบกำหนดตำแหน่งเฉพาะ Catapult ClearSky T6 สำหรับการฝึกซ้อมกีฬาประเภททีมในสภาพในร่ม Frontiers in physiology , 9, 115.
- Serpiello, FR, Hopkins, WG, Barnes, S., Tavrou, J., Duthie, GM, Aughey, RJ, & Ball, K. (2018). ความถูกต้องของระบบกำหนดตำแหน่งเฉพาะที่แบบอัลตราไวด์แบนด์ในการวัดการเคลื่อนที่ในกีฬาในร่ม Journal of sports sciences , 36(15), 1727-1733.
- Hodder, RW, Ball, KA และ Serpiello, FR (2020) เกณฑ์ความถูกต้องของระบบระบุตำแหน่งท้องถิ่น Catapult ClearSky T6 สำหรับการวัดระยะทางระหว่างหน่วย เซ็นเซอร์ 20(13), 3693
- R Core Team (2021) R: ภาษาและสภาพแวดล้อมสำหรับการคำนวณทางสถิติ R Foundation for Statistical Computing เวียนนา ออสเตรีย URL https://www.R-project.org/
- Van Boxtel, GJM, Laboissière, R., & Wilhelm, HD (2021) gsignal: การประมวลผลสัญญาณ URL: https://github.com/gjmvanboxtel/gsignal