Livre blanc : Vecteur de validation T7
Matthew C. Varley, Susanne Ellens, David Carey. Groupe de recherche sur le sport, les performances et la nutrition, École de santé, de services humains et de sport, Université La Trobe, Melbourne, VIC, Australie.
1. L'INTRODUCTION
Les systèmes de suivi des athlètes sont devenus un outil essentiel pour le sport. Ils permettent aux praticiens de quantifier et d'analyser les mouvements des athlètes afin de mieux comprendre la charge d'entraînement, la performance physique, le comportement tactique et le risque de blessure.1
Bien que de nombreux systèmes de suivi soient disponibles, la plupart d'entre eux présentent des limites lorsqu'ils sont utilisés en intérieur. Le système de positionnement local ClearSky(LPS) est une technologie qui permet de suivre et de mesurer les performances des athlètes dans les environnements intérieurs. Plus précisément, le système indique la position et les mesures dérivées de la position telles que la distance, la vitesse et l'accélération.
Le Vector T7 est un nouveau dispositif portable utilisé avec le système ClearSky. Le Vector T7 est similaire aux dispositifs précédents utilisés avec ClearSky (Vector S7 et Catapult T6), avec une fréquence d'échantillonnage de 10 Hz.
Cependant, le Vector T7 utilise un protocole de différence de temps d'arrivée (TDOA) pour déterminer la position, alors que les appareils précédents utilisent un protocole de télémétrie bidirectionnelle (TWR). L'avantage du protocole TDOA est qu'il nécessite une consommation d'énergie nettement inférieure à celle du protocole TWR, tout en maintenant la précision des données de positionnement.
Cette réduction de puissance permet de réduire la taille de l'appareil. La taille réduite de l'appareil permet au Vector T7 d'être porté à plusieurs endroits sur l'athlète, notamment entre les omoplates ou au niveau de la taille.
Les systèmes de suivi des athlètes nécessitent une validation de leur capacité à mesurer les mouvements des athlètes pour que les praticiens aient confiance dans les données qui leur permettent de prendre des décisions sur les pratiques d'entraînement et de match. Comme pour toute technologie, les fabricants publieront des modèles mis à jour au fil du temps, au fur et à mesure des améliorations apportées au matériel de l'appareil et aux algorithmes sous-jacents.
Chaque nouveau modèle doit être validé afin de déterminer la capacité du nouveau dispositif à mesurer ce qu'il est censé mesurer (par exemple, la position, la vitesse et l'accélération).1 Cela se fait généralement en comparant les données du dispositif à un critère de mesure. Le système Vicon est un système de caméra de capture de mouvement considéré comme l'étalon-or pour la mesure de la position. Il est courant que le système Vicon soit utilisé comme critère de mesure dans la validation de la technologie de suivi des athlètes.2, 3
Des études ont évalué la validité des appareils Catapult T6 pour mesurer la distance, la vitesse et l'accélération lors de tâches spécifiques aux sports d'équipe, y compris les efforts maximaux linéaires et les mouvements de changement de direction.4,5,6
Ces études ont utilisé un système de caméra de capture de mouvement (Vicon ou Qualisys Oqus) comme critère de mesure et toutes les études ont conclu que les appareils Catapult T6 avaient une validité acceptable pour l'évaluation des mouvements des athlètes. Étant donné que le Vector T7 n'a été développé que récemment, la validation de cet appareil est nécessaire.
L'objectif de cette étude était donc d'évaluer la validité des nouveaux appareils Vector T7 pour mesurer la distance, la vitesse et l'accélération.
→ Téléchargez ce livre blanc Vector T7 en cliquant ici.

2. LES MÉTHODES
Six participants masculins (28,8 ± 5,6 ans), actifs sur le plan récréatif, ont participé à cette étude. Tous les participants ont donné leur consentement écrit pour leur participation à l'étude et les procédures utilisées ont été menées avec l'approbation du Comité d'éthique de la recherche humaine de l'Université La Trobe.
La collecte des données a été effectuée dans une salle de sport de 40 x 70 m, composée de trois terrains de basket-ball. Les participants ont effectué sept essais de mouvements différents dans une zone de 20 x 5 m sur l'un des terrains de basket. Pendant les essais, les données sur les mouvements des joueurs ont été recueillies par un LPS (Catapult ClearSky, Catapult, Melbourne, Australie) et un système d'analyse du mouvement à 20 caméras (Vantage, Vicon Motion Systems, Oxford, Royaume-Uni).
Une description et un schéma de chaque essai sont présentés dans le tableau 1 et la figure 1. Il a été demandé aux participants d'effectuer tous les essais à une intensité maximale et de s'arrêter complètement à la fin de l'essai (décélération). Les participants ont effectué un échauffement de 5 minutes avant le début de l'essai. Chaque essai de mouvement a été effectué deux fois pour un total de 14 essais, chaque essai étant séparé d'environ 3 minutes.
Les participants ont été équipés de quatre appareils Vector T7 placés à quatre endroits différents. Un appareil a été placé entre les omoplates du participant à l'aide du gilet fourni par le fabricant.
Les trois autres dispositifs ont été placés autour de la taille des participants, plus précisément à l'avant (section transversale du point médian entre les deux épines iliaques supérieures antérieures), sur le côté gauche (section transversale du point médian entre les épines iliaques supérieures antérieures et postérieures) et à l'arrière (section transversale du point médian entre les deux épines iliaques supérieures postérieures) dans un clip de ceinture personnalisé fourni par le fabricant, qui se fixait au short des participants.
En plus des essais de mouvement, un essai statique a été réalisé pour évaluer la stabilité du positionnement des appareils Vector T7 à l'aide d'un protocole de placement fixe. Trois appareils ont été placés sur un trépied (à une hauteur de 1,5 m) et ont recueilli des données pendant 10 minutes. Deux des appareils ont été placés au centre du terrain et un sur le bord large du terrain.
Le système ClearSky LPS a été installé autour de la salle de sport et comprenait 21 nœuds d'ancrage fixés à une hauteur moyenne de 8,4 m du sol avec une distance moyenne de 10,4 m entre chaque nœud. Les données ont été saisies à 10 Hz et traitées à l'aide du logiciel du fabricantOpenField version 3.9.0). Les données de vitesse, d'accélération, de position x-y et d'odomètre (distance cumulée) ont été exportées pour chaque essai en vue d'une analyse ultérieure.
Le système d'analyse du mouvement à 20 caméras (Vicon) échantillonnant à 100 Hz a été utilisé comme critère de mesure de la distance, de la vitesse et de l'accélération. Les caméras ont été montées sur des trépieds et placées à 3 m du périmètre de la zone où les essais de mouvement ont été effectués. Quatre marqueurs rétroréfléchissants d'un diamètre de 32 mm ont été placés à l'extérieur du gilet fourni par le fabricant et de chaque clip de ceinture contenant les dispositifs Vector T7, en correspondance avec le milieu de chaque dispositif.
Les données Vicon ont été étiquetées et traitées avec Vicon Nexus 2.14. Le traitement des données brutes Vicon a consisté en un filtrage à l'aide d'un filtre passe-bas Butterworth de quatrième ordre avec une fréquence de coupure de 3Hz qui a été déterminée sur la base d'une analyse résiduelle. Les lacunes dans les données ≤50 ms (5 échantillons) ont été comblées à l'aide d'une interpolation spline, les lacunes ≥50 ms ont été exclues de l'analyse. Les coordonnées XY des données Vicon filtrées à 100 Hz ont été utilisées pour l'analyse, les coordonnées z (déplacement vertical) ont été négligées dans les calculs car ClearSky était configuré pour un positionnement bidimensionnel (2D).
Pour chacun des quatre marqueurs Vicon dans chaque essai de mouvement (n=320), la vitesse 2D a été calculée en différenciant les données de position et en appliquant le même filtre que celui utilisé dans le logiciel du fabricant sur les données LPS. Cette information a été fournie aux chercheurs par le fabricant ; cependant, les détails ne sont pas inclus ici en raison de la propriété intellectuelle du fabricant. De même, l'accélération a été calculée en différenciant les données de vitesse et en les filtrant à l'aide des spécifications du fabricant.
Les mesures dérivées du Vicon ont été échantillonnées à 10 Hz, puis synchronisées avec les données Catapult par corrélation croisée des signaux de vitesse afin de trouver le décalage temporel qui maximise la corrélation. Tous les traitements et analyses de données ont été effectués à l'aide du langage de programmation statistique R (version 4.0.4)7 et du progiciel gsignal8.
Tableau 1. Description des essais de mouvement
| Procès # | Description |
| 1 | Sprint linéaire de 5 m |
| 2 | Sprint linéaire de 10 m |
| 3 | Sprint linéaire de 20 m |
| 4 | Sprint linéaire de 5 m suivi d'un changement de direction de 45 degrés suivi d'un sprint linéaire de 5 m |
| 5 | Sprint linéaire de 5 m suivi d'un changement de direction de 90 degrés suivi d'un sprint linéaire de 5 m |
| 6 | Sprint linéaire de 5 m suivi d'un changement de direction de 180 degrés suivi d'un sprint linéaire de 5 m |
| 7 | Un circuit comprenant une combinaison de sprints linéaires et de changements de direction. |
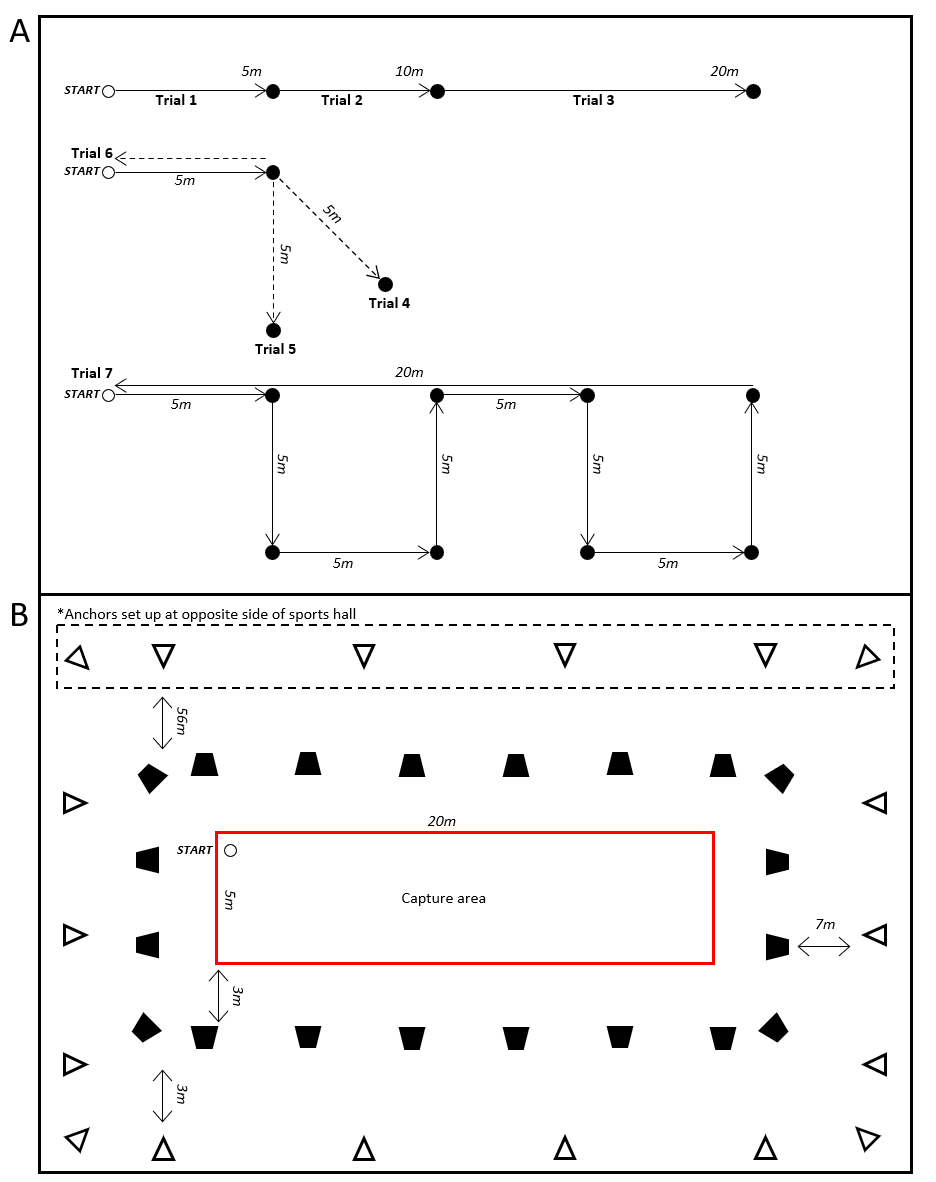
Figure 1. A) Schéma des sept essais de mouvement différents. B) Installation pendant la collecte des données, tous les essais ont commencé à partir du point de référence de départ (cercle blanc), des caméras Vicon (trapèze noir), des nœuds d'ancrage ClearSky (triangles blancs). Remarque : la salle de sport (40 x 70 m) n'est pas représentée dans son intégralité pour des raisons de clarté.
→ Téléchargez ce livre blanc Vector T7 en cliquant ici.

3. L'ANALYSE STATISTIQUE
Essais de mouvement
Les paramètres suivants ont été calculés pour chaque essai en comparant les données dérivées du Vector T7 et du Vicon : la différence moyenne quadratique (RMSD) pour la vitesse et l'accélération et la différence absolue moyenne (MAD) pour la distance de positionnement d'un échantillon à l'autre. Les essais Vicon pour lesquels il manquait plus de 10 % de données ont été exclus des analyses (n = 12) en raison de l'introduction d'effets de bord par l'approche de filtrage lorsque des lacunes existaient dans les données. Les résultats sont présentés sous forme de moyenne, de médiane et d'intervalles interquartiles (IQR) pour chaque mesure, pour l'ensemble des essais, et stratifiés en fonction de l'emplacement de l'appareil et du type de mouvement.
Essais statiques
Pour les essais de dispositifs statiques, la distance et le déplacement positionnels d'un échantillon à l'autre ont été calculés. Les résultats sont présentés sous forme de moyenne, médiane, IQR et total cumulé pour la distance et le déplacement entre le premier et le dernier échantillon de l'essai de 10 minutes. L'"odomètre" du fabricant a été inclus dans les résultats pour chaque appareil comme point de référence pour le calcul de la distance parcourue.
4. RÉSULTATS
Essais de mouvement
Les différences entre le ClearSky LPS et la vitesse dérivée du Vicon sont présentées dans le tableau 2 et la figure 2. Sur les quatre positions de l'appareil testées, l'appareil porté dans la veste présentait le plus petit RMSD moyen et médian, et l'appareil porté à l'avant de la taille le plus élevé.
Cette observation a été répétée pour la RMSD de l'accélération(tableau 3 et figure 2). Les essais de mouvement linéaire ont donné lieu à la concordance la plus étroite entre les méthodes pour la vitesse. L'essai de mouvement de changement de direction de1800 a donné les valeurs RMSD les plus élevées pour l'accélération.
Tableau 2. Vitesse RMSD (m-s-1) entre les dispositifs Catapult et le système d'analyse de mouvement Vicon.
| N | Moyenne | Médiane | IQR | ||
| Tous | 308 | 0.19 | 0.14 | 0.11 - 0.21 | |
| Emplacement de l'appareil | Gilet | 79 | 0.14 | 0.12 | 0.09 - 0.15 |
| Retour | 77 | 0.20 | 0.15 | 0.12 - 0.22 | |
| Front | 76 | 0.24 | 0.17 | 0.14 - 0.27 | |
| Côté gauche | 76 | 0.18 | 0.13 | 0.11 - 0.18 | |
| Type de mouvement | Linéaire | 140 | 0.17 | 0.12 | 0.09 - 0.18 |
| COD 45 | 44 | 0.27 | 0.22 | 0.14 - 0.32 | |
| COD 90 | 43 | 0.18 | 0.15 | 0.11 - 0.20 | |
| COD 180 | 48 | 0.18 | 0.14 | 0.13 - 0.17 | |
| Circuit | 33 | 0.22 | 0.18 | 0.17 - 0.24 |
Tableau 3. Accélération RMSD (m-s-2) entre les dispositifs Catapult et le système d'analyse du mouvement Vicon.
| N | Moyenne | Médiane | IQR | ||
| Tous | 308 | 0.79 | 0.76 | 0.64 - 0.91 | |
| Emplacement de l'appareil | Gilet | 79 | 0.75 | 0.74 | 0.62 - 0.81 |
| Retour | 77 | 0.77 | 0.76 | 0.60 - 0.91 | |
| Front | 76 | 0.85 | 0.83 | 0.66 - 0.97 | |
| Côté gauche | 76 | 0.79 | 0.79 | 0.65 - 0.88 | |
| Type de mouvement | Linéaire | 140 | 0.69 | 0.73 | 0.60 - 0.81 |
| COD 45 | 44 | 0.67 | 0.67 | 0.48 - 0.87 | |
| COD 90 | 43 | 0.75 | 0.74 | 0.66 - 0.85 | |
| COD 180 | 48 | 1.24 | 1.25 | 1.16 - 1.32 | |
| Circuit | 33 | 0.77 | 0.80 | 0.73 - 0.86 |
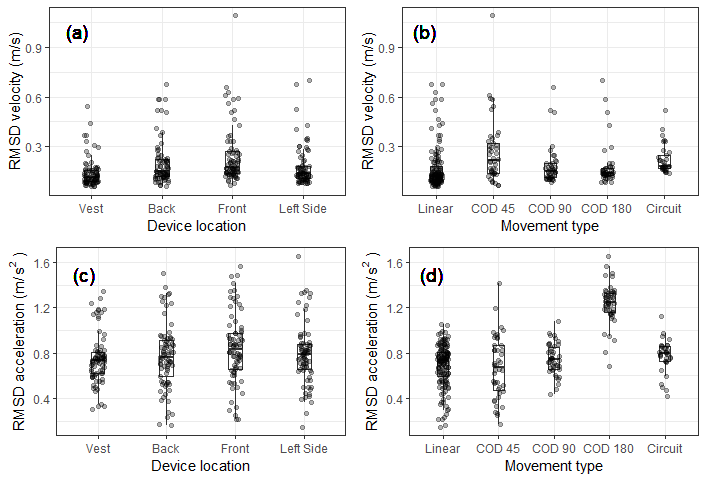
Figure 2. Résultats de la RMSD pour la vitesse (première ligne) et l'accélération (deuxième ligne) pour chaque essai, stratifiés en fonction de l'emplacement du dispositif (première colonne) et du type de mouvement (deuxième colonne).
Le tableau 4 montre le MAD dans la distance d'échantillon à échantillon dérivée des données de suivi positionnel du Vector T7 et du Vicon. Sur l'ensemble des essais, la différence moyenne était de 0,39 m. Les différences étaient plus importantes pour le dispositif porté à l'avant de la taille et pendant l'essai de mouvement en circuit.
Tableau 4. MAD dans la distance d'échantillon à échantillon (m) entre les dispositifs Catapult et le système d'analyse de mouvement Vicon.
| N | Moyenne | Médiane | IQR | ||
| Tous | 308 | 0.04 | 0.03 | 0.02 - 0.05 | |
| Emplacement de l'appareil | Gilet | 79 | 0.03 | 0.03 | 0.02 - 0.04 |
| Retour | 77 | 0.04 | 0.03 | 0.02 - 0.04 | |
| Front | 76 | 0.05 | 0.04 | 0.03 - 0.06 | |
| Côté gauche | 76 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Type de mouvement | Linéaire | 140 | 0.03 | 0.03 | 0.02 - 0.04 |
| COD 45 | 44 | 0.04 | 0.04 | 0.03 - 0.05 | |
| COD 90 | 43 | 0.04 | 0.03 | 0.03 - 0.04 | |
| COD 180 | 48 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Circuit | 33 | 0.07 | 0.06 | 0.05 - 0.09 |
Essais statiques
La médiane et l'IQR de la distance d'échantillon à échantillon pour tous les dispositifs stationnaires étaient de zéro(tableau 5), ce qui indique que dans la majorité des pas de temps, les dispositifs n'ont pas changé leurs coordonnées x ou y.
Toutefois, les appareils ont enregistré certains changements de position, de sorte que la distance moyenne entre les échantillons était d'environ 1 à 2 mm. Sur une période de 10 minutes, il n'y a pas eu de biais directionnel important et la position finale des appareils était très proche de leur position initiale (déplacement final de l'ordre de quelques centimètres).
Le traitement et le filtrage des données exclusifs inclus dans le calcul de la distance cumulée par le fabricant (la variable "odomètre") ont permis de corriger les petits changements de position et de restituer des distances totales inférieures à 0,02 mètre.
Tableau 5. Résultats des essais statiques (trois appareils laissés à l'arrêt pendant 10 minutes).
| Dérivé des positions x, y | |||||
| Distance entre les échantillons successifs (m) | Déplacement de l'échantillon final (m) | Odomètre de l'échantillon final (m) | |||
| Dispositif | Moyenne | Médiane | IQR | ||
| Tous | 0.001898 | 0 | 0 - 0 | ||
| 1 | 0.001644 | 0 | 0 - 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 - 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 - 0 | (-0.06, -0.05) | 0.01 |
→ Téléchargez ce livre blanc Vector T7 en cliquant ici.
5. RÉSUMÉ
- Les appareils Vector T7 présentaient un faible RMSD pour les mesures de vitesse et d'accélération et un faible MAD pour les mesures de distance lors d'essais de mouvement impliquant des taux élevés d'accélération, de décélération et de changement de direction.
- Les appareils du vecteur T7 ont affiché une faible RMSD similaire pour les mesures d'accélération dans tous les essais de mouvement, à l'exception d'un changement de direction de 180 degrés où la RMSD était légèrement plus élevée. Cela est probablement dû au fait que les mouvements de cet essai impliquaient des taux d'accélération/décélération plus élevés et suggère que l'erreur augmente à mesure que le taux de changement de vitesse augmente. Cependant, cette erreur peut encore être considérée comme faible (RMSD moyenne de 1,24).
- Le placement du gilet a entraîné l'erreur la plus faible pour les mesures de vitesse, d'accélération et de distance, tandis que le placement de l'appareil à l'avant de la taille a entraîné l'erreur la plus élevée. Indépendamment de l'emplacement du dispositif, tous les emplacements ont donné lieu à une faible erreur pour toutes les mesures avec tous les RMSD ≤ 0,85.
- La stabilité de position des dispositifs Vector T7 à l'arrêt était élevée, avec une distance moyenne entre les échantillons d'environ 1 à 2 mm.
- La faible erreur suggère que le dispositif Vector T7 utilisé en conjonction avec ClearSky fournit une mesure valide de la vitesse, de l'accélération et de la distance pendant les tâches spécifiques aux sports d'équipe, y compris les efforts maximaux linéaires et les mouvements de changement de direction.
→ Téléchargez ce livre blanc Vector T7 en cliquant ici.
6. RÉFÉRENCES
- Malone, J. J., Lovell, R., Varley, M. C. et Coutts, A. J. (2017). Unpacking the black box : applications and considerations for using GPS devices in sport. International journal of sports physiology and performance, 12(s2), S2-18.
- Linke, D., Link, D. et Lames, M. (2018). Validation des systèmes électroniques de performance et de suivi EPTS dans des conditions de terrain. PloS one, 13(7), e0199519.
- Linke, D., Link, D. et Lames, M. (2020). Football-specific validity of TRACAB's optical video tracking systems (validité spécifique au football des systèmes de suivi vidéo optique de TRACAB). PloS one, 15(3), e0230179.
- Luteberget, L. S., Spencer, M. et Gilgien, M. (2018). Validité du système de positionnement local Catapult ClearSky T6 pour les exercices spécifiques aux sports d'équipe, dans des conditions intérieures. Frontiers in physiology, 9, 115.
- Serpiello, F. R., Hopkins, W. G., Barnes, S., Tavrou, J., Duthie, G. M., Aughey, R. J., & Ball, K. (2018). Validité d'un système de positionnement local à bande ultra-large pour mesurer la locomotion dans les sports en salle. Journal of sports sciences, 36(15), 1727-1733.
- Hodder, R. W., Ball, K. A. et Serpiello, F. R. (2020). Critère de validité du système de positionnement local Catapult ClearSky T6 pour la mesure de la distance inter-unités. Sensors, 20(13), 3693.
- R Core Team (2021). R : un langage et un environnement pour le calcul statistique. R Foundation for Statistical Computing, Vienne, Autriche. URL https://www.R-project.org/
- Van Boxtel, G.J.M., Laboissière, R., & Wilhelm, H.D. (2021). gsignal : Traitement du signal. URL : https://github.com/gjmvanboxtel/gsignal