Libro Blanco: Vector de validación T7
Matthew C. Varley, Susanne Ellens, David Carey. Sport, Performance, and Nutrition Research Group, School of Allied Health, Human Services, & Sport, La Trobe University, Melbourne, VIC, Australia.
1. INTRODUCCIÓN
Los sistemas de seguimiento de deportistas se han convertido en una herramienta esencial para el deporte. Estos sistemas permiten a los profesionales cuantificar y analizar el movimiento de los deportistas para comprender mejor la carga de entrenamiento, el rendimiento físico, el comportamiento táctico y el riesgo de lesiones.1
Aunque existen muchos sistemas de seguimiento, la mayoría tienen limitaciones cuando se utilizan en interiores. El sistema de posicionamiento local ClearSky(LPS) es una tecnología que permite seguir y medir el rendimiento de los atletas en interiores. En concreto, el sistema emite la posición y las métricas derivadas de la posición, como la distancia, la velocidad y la aceleración.
El Vector T 7 es un nuevo dispositivo portátil que se utiliza con el sistema ClearSky. El Vector T7 es similar a los dispositivos anteriores utilizados con ClearSky (Vector S7 y Catapult T6), con una frecuencia de muestreo de 10 Hz.
Sin embargo, el Vector T7 utiliza un protocolo de diferencia de tiempo de llegada (TDOA) para obtener la posición, mientras que los dispositivos anteriores utilizan un protocolo de alcance bidireccional (TWR). La ventaja del protocolo TDOA es que el dispositivo consume mucha menos energía que el protocolo TWR y mantiene la precisión de los datos de posición.
Esta reducción de potencia permite reducir el tamaño del dispositivo. El menor tamaño del dispositivo permite llevar el Vector T7 en varias posiciones en el deportista, incluida la colocación tradicional entre los omóplatos o colocado en la cintura.
Los sistemas de seguimiento de atletas requieren la validación de su capacidad para medir el movimiento del atleta para que los profesionales confíen en los datos que les permiten tomar decisiones sobre el entrenamiento y las prácticas de partido. Como ocurre con toda tecnología, los fabricantes lanzarán modelos actualizados con el tiempo, a medida que se introduzcan mejoras tanto en el hardware de los dispositivos como en sus algoritmos subyacentes.
Cada nuevo modelo requiere una validación para determinar la capacidad del nuevo dispositivo para medir lo que se pretende medir (por ejemplo, posición, velocidad y aceleración).1 Esto se suele hacer comparando los datos del dispositivo con una medida de criterio. El sistema Vicon es un sistema de cámara de captura de movimiento considerado el patrón oro para medir la posición. Es habitual que Vicon se utilice como medida de criterio en la validación de la tecnología de seguimiento de atletas.2, 3
Diversos estudios han evaluado la validez de los dispositivos Catapult T6 para medir la distancia, la velocidad y la aceleración durante tareas específicas de deportes de equipo, incluidos los esfuerzos lineales máximos y los movimientos de cambio de dirección.4,5,6
Estos estudios utilizaron un sistema de cámara de captura de movimiento (Vicon o Qualisys Oqus) como medida de criterio y todos ellos concluyeron que los dispositivos Catapult T6 tenían una validez aceptable para evaluar el movimiento del atleta. Dado que el Vector T7 se ha desarrollado recientemente, es necesario validar este dispositivo.
Por lo tanto, el objetivo de este estudio era evaluar la validez de los nuevos dispositivos Vector T7 para medir la distancia, la velocidad y la aceleración.
→ Descargue este Libro Blanco de Vector T7 haciendo clic aquí.

2. MÉTODOS
Participaron en este estudio seis varones (28,8 ± 5,6 años) que practicaban actividades recreativas. Todos los participantes dieron su consentimiento por escrito para participar en el estudio y los procedimientos utilizados se llevaron a cabo con la aprobación del Comité Ético de Investigación Humana de la Universidad de La Trobe.
La recogida de datos se llevó a cabo en un pabellón deportivo de 40 x 70 m, que constaba de tres canchas de baloncesto. Los participantes realizaron siete pruebas de movimiento diferentes en un área de 20 x 5 m en una de las canchas de baloncesto. Durante las pruebas, los datos de movimiento de los jugadores se recogieron mediante un LPS (Catapult ClearSky, Catapult, Melbourne, Australia) y un sistema de análisis de movimiento de 20 cámaras (Vantage, Vicon Motion Systems, Oxford, Reino Unido).
En la Tabla 1 y la Figura 1 se muestra una descripción y un esquema de cada ensayo. Se pidió a los participantes que realizaran todas las pruebas a una intensidad máxima y que se detuvieran por completo al final de la prueba (desaceleración). Los participantes realizaron un calentamiento de 5 minutos antes de comenzar la prueba. Cada prueba de movimiento se realizó dos veces para un total de 14 pruebas, con un intervalo de 3 minutos entre cada una.
Se equipó a los participantes con cuatro dispositivos Vector T7 colocados en cuatro lugares diferentes. Un dispositivo se colocó entre los omóplatos del participante utilizando el chaleco suministrado por el fabricante.
Los tres dispositivos restantes se colocaron alrededor de la cintura de los participantes, concretamente en la parte delantera (sección transversal del punto medio entre las dos espinas ilíacas anterosuperiores), en el lado izquierdo (sección transversal del punto medio entre las espinas ilíacas anterosuperiores y posteriores) y en la parte posterior (sección transversal del punto medio entre las dos espinas ilíacas posterosuperiores) en un clip de cintura personalizado suministrado por el fabricante que se enganchaba a los pantalones cortos de los participantes.
Aparte de los ensayos de movimiento, se realizó un ensayo estático para evaluar la estabilidad de posicionamiento de los dispositivos Vector T7 utilizando un protocolo de colocación fija. Se colocaron tres dispositivos en un trípode (a 1,5 m de altura) y se dejaron recogiendo datos durante 10 minutos. De los dispositivos, dos se colocaron en el centro de la pista central y uno en el borde ancho de la pista.
El ClearSky LPS se instaló alrededor del pabellón deportivo y constaba de 21 nodos de anclaje fijados a una altura media de 8,4 m del suelo con una distancia media de 10,4 m entre cada nodo. Los datos se capturaron a 10 Hz y se procesaron con el software del fabricanteOpenField versión 3.9.0). Se exportaron los datos de velocidad, aceleración, posición x-y y odómetro (distancia acumulada) de cada ensayo para su posterior análisis.
El sistema de análisis de movimiento de 20 cámaras (Vicon), con muestreo a 100 Hz, se utilizó como criterio de medida de la distancia, la velocidad y la aceleración. Las cámaras se montaron sobre trípodes y se colocaron a 3 m del perímetro de la zona donde se realizaron los ensayos de movimiento. Se colocaron cuatro marcadores retrorreflectantes de 32 mm de diámetro en la parte exterior del chaleco suministrado por el fabricante y en cada pinza de cintura que contenía los dispositivos Vector T7, en correspondencia con el centro de cada dispositivo.
Los datos de Vicon se etiquetaron y procesaron con Vicon Nexus 2.14. El tratamiento de los datos brutos de Vicon consistió en el filtrado mediante un filtro Butterworth de paso bajo de cuarto orden con una frecuencia de corte de 3 Hz que se determinó basándose en el análisis residual. Las lagunas en los datos ≤50 ms (5 muestras) se rellenaron mediante interpolación spline; las lagunas ≥50 ms se excluyeron del análisis. Las coordenadas XY de los datos Vicon de 100 Hz filtrados se utilizaron para el análisis; las coordenadas z (desplazamiento vertical) no se tuvieron en cuenta en los cálculos, ya que ClearSky estaba configurado para el posicionamiento bidimensional (2D).
Para cada uno de los cuatro marcadores Vicon en cada ensayo de movimiento (n=320) se calculó la velocidad 2D diferenciando los datos posicionales y aplicando el mismo filtro utilizado en el software del fabricante en los datos LPS. Esta información fue proporcionada a los investigadores por el fabricante; sin embargo, los detalles no se incluyen aquí debido a la propiedad intelectual del fabricante. Del mismo modo, la aceleración se calculó diferenciando los datos de velocidad y filtrándolos según las especificaciones del fabricante.
Las métricas derivadas de Vicon se muestrearon a 10 Hz y luego se sincronizaron con los datos de Catapult mediante la correlación cruzada de las señales de velocidad para encontrar el desfase temporal que maximizara la correlación. Todos los datos se procesaron y analizaron con el lenguaje de programación estadística R (versión 4.0.4)7 y el paquete gsignal8.
Tabla 1. Descripción de los ensayos de movimiento
| Juicio # | Descripción |
| 1 | Esprint lineal de 5 m |
| 2 | Esprint lineal de 10 m |
| 3 | Esprint lineal de 20 m |
| 4 | Sprint lineal de 5 m en cambio de dirección de 45 grados en sprint lineal de 5 m |
| 5 | Sprint lineal de 5 m en cambio de dirección de 90 grados en sprint lineal de 5 m |
| 6 | Sprint lineal de 5 m en cambio de dirección de 180 grados en sprint lineal de 5 m |
| 7 | Un circuito que incluye una combinación de sprints lineales y cambios de dirección |
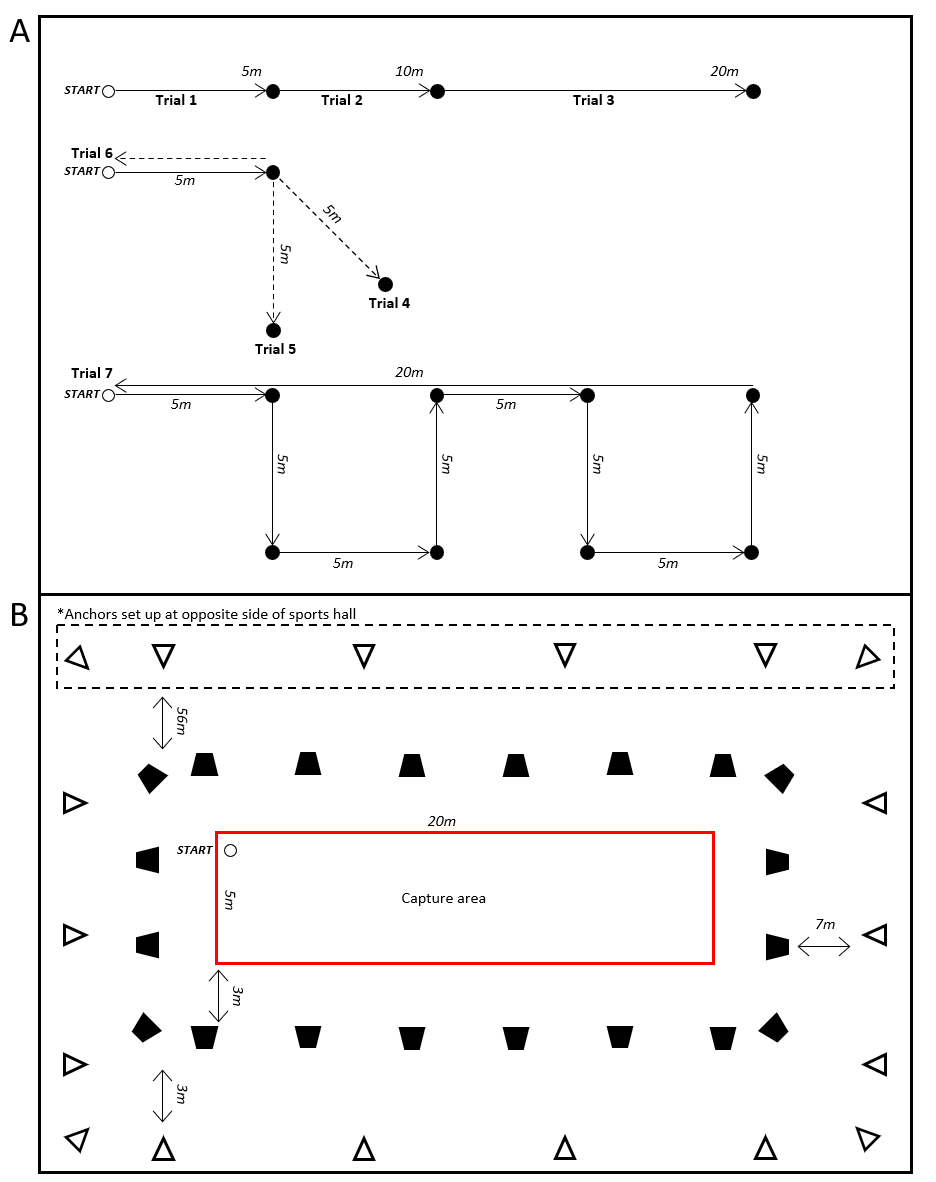
Figura 1. A) Esquema de los siete ensayos de movimiento diferentes. B) Configuración durante la recogida de datos, todas las pruebas comenzaron desde el punto de referencia inicial (círculo blanco), cámaras Vicon (trapecio negro), nodos de anclaje ClearSky (triángulos blancos). Nota: El pabellón deportivo completo (40 x 70 m no se muestra en su totalidad para mayor claridad).
→ Descargue este Libro Blanco de Vector T7 haciendo clic aquí.

3. ANÁLISIS ESTADÍSTICO
Pruebas de movimiento
Se calcularon las siguientes métricas para cada ensayo comparando el Vector T7 y los datos derivados de Vicon: diferencia estándar media de la raíz (RMSD) para la velocidad y la aceleración y diferencia absoluta media (MAD) para la distancia posicional entre muestras. Se excluyeron de los análisis los ensayos de Vicon en los que faltaba más del 10% de los datos (n = 12) debido a la introducción de efectos de borde por el enfoque de filtrado cuando existían lagunas en los datos. Los resultados se presentan como media, mediana y rangos intercuartílicos (IQR) para cada métrica, en todos los ensayos y estratificados por ubicación del dispositivo y tipo de movimiento.
Ensayos estáticos
En los ensayos con dispositivos estáticos se calcularon la distancia posicional y el desplazamiento de muestra a muestra. Los resultados se presentan como la media, la mediana, el IQR y el total acumulado para la distancia, y el desplazamiento desde la primera hasta la última muestra en el ensayo de 10 minutos. La métrica del fabricante "odómetro" se incluyó en los resultados de cada dispositivo como punto de referencia para la distancia recorrida calculada.
4. RESULTADOS
Pruebas de movimiento
Las diferencias entre ClearSky LPS y la velocidad derivada de Vicon se muestran en la Tabla 2 y en la Figura 2. De las cuatro posiciones del dispositivo probadas, el dispositivo que se llevaba en el chaleco presentaba la menor RMSD media y mediana, y el dispositivo que se llevaba en la parte delantera de la cintura, la mayor.
Esta observación se repitió para la RMSD en aceleración(Tabla 3 y Figura 2). Los ensayos de movimiento lineal presentaron la mayor concordancia entre métodos para la velocidad. El ensayo de movimiento de cambio de dirección de1800 dio lugar a los valores más altos de RMSD para la aceleración.
Tabla 2. RMSD de velocidad (m-s-1) entre los dispositivos Catapult y el sistema de análisis de movimiento Vicon.
| N | Media | Mediana | IQR | ||
| Todos | 308 | 0.19 | 0.14 | 0.11 - 0.21 | |
| Ubicación del dispositivo | Chaleco | 79 | 0.14 | 0.12 | 0.09 - 0.15 |
| Volver | 77 | 0.20 | 0.15 | 0.12 - 0.22 | |
| Frente | 76 | 0.24 | 0.17 | 0.14 - 0.27 | |
| Lado izquierdo | 76 | 0.18 | 0.13 | 0.11 - 0.18 | |
| Tipo de movimiento | Lineal | 140 | 0.17 | 0.12 | 0.09 - 0.18 |
| COD 45 | 44 | 0.27 | 0.22 | 0.14 - 0.32 | |
| COD 90 | 43 | 0.18 | 0.15 | 0.11 - 0.20 | |
| COD 180 | 48 | 0.18 | 0.14 | 0.13 - 0.17 | |
| Circuito | 33 | 0.22 | 0.18 | 0.17 - 0.24 |
Tabla 3. RMSD de aceleración (m-s-2) entre los dispositivos Catapult y el sistema de análisis de movimiento Vicon.
| N | Media | Mediana | IQR | ||
| Todos | 308 | 0.79 | 0.76 | 0.64 - 0.91 | |
| Ubicación del dispositivo | Chaleco | 79 | 0.75 | 0.74 | 0.62 - 0.81 |
| Volver | 77 | 0.77 | 0.76 | 0.60 - 0.91 | |
| Frente | 76 | 0.85 | 0.83 | 0.66 - 0.97 | |
| Lado izquierdo | 76 | 0.79 | 0.79 | 0.65 - 0.88 | |
| Tipo de movimiento | Lineal | 140 | 0.69 | 0.73 | 0.60 - 0.81 |
| COD 45 | 44 | 0.67 | 0.67 | 0.48 - 0.87 | |
| COD 90 | 43 | 0.75 | 0.74 | 0.66 - 0.85 | |
| COD 180 | 48 | 1.24 | 1.25 | 1.16 - 1.32 | |
| Circuito | 33 | 0.77 | 0.80 | 0.73 - 0.86 |
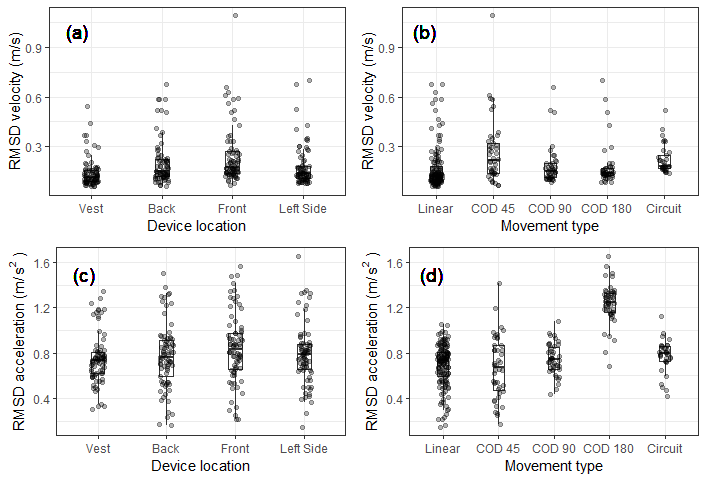
Figura 2. Resultados RMSD de velocidad (primera fila) y aceleración (segunda fila) para cada ensayo, estratificados por ubicación del dispositivo (primeras columnas) y tipo de movimiento (segunda columna).
La tabla 4 muestra la MAD en la distancia muestra a muestra derivada de los datos de seguimiento posicional de Vector T7 y Vicon. En todos los ensayos, la diferencia media fue de 0,39 m; las diferencias fueron mayores en el dispositivo llevado en la parte delantera de la cintura y durante el ensayo de movimiento en circuito.
Tabla 4. MAD en distancia de muestra a muestra (m) entre los dispositivos Catapult y el sistema de análisis de movimiento Vicon.
| N | Media | Mediana | IQR | ||
| Todos | 308 | 0.04 | 0.03 | 0.02 - 0.05 | |
| Ubicación del dispositivo | Chaleco | 79 | 0.03 | 0.03 | 0.02 - 0.04 |
| Volver | 77 | 0.04 | 0.03 | 0.02 - 0.04 | |
| Frente | 76 | 0.05 | 0.04 | 0.03 - 0.06 | |
| Lado izquierdo | 76 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Tipo de movimiento | Lineal | 140 | 0.03 | 0.03 | 0.02 - 0.04 |
| COD 45 | 44 | 0.04 | 0.04 | 0.03 - 0.05 | |
| COD 90 | 43 | 0.04 | 0.03 | 0.03 - 0.04 | |
| COD 180 | 48 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Circuito | 33 | 0.07 | 0.06 | 0.05 - 0.09 |
Ensayos estáticos
La mediana y el IQR de la distancia entre muestras para todos los dispositivos fijos fue cero(Tabla 5), lo que indica que en la mayoría de los pasos temporales los dispositivos no cambiaron sus coordenadas x o y.
Sin embargo, los dispositivos registraron algunos cambios de posición, de modo que la distancia media entre muestras fue de aproximadamente 1-2 mm. A lo largo de 10 minutos no se observó un fuerte sesgo direccional, y la ubicación final de los dispositivos se aproximó mucho a sus posiciones iniciales (desplazamiento final del orden de unos pocos centímetros).
El procesamiento y filtrado de datos patentado incluido en el cálculo del fabricante de la distancia acumulada (la variable "cuentakilómetros") fue capaz de corregir los pequeños cambios de posición y devolvió distancias totales inferiores a 0,02 m.
Tabla 5. Resultados de los ensayos estáticos (tres dispositivos dejados inmóviles durante 10 minutos).
| Derivado de las posiciones x, y | |||||
| Distancia entre muestras sucesivas (m) | Desplazamiento en la muestra final (m) | Cuentakilómetros en la muestra final (m) | |||
| Dispositivo | Media | Mediana | IQR | ||
| Todos | 0.001898 | 0 | 0 - 0 | ||
| 1 | 0.001644 | 0 | 0 - 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 - 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 - 0 | (-0.06, -0.05) | 0.01 |
→ Descargue este Libro Blanco de Vector T7 haciendo clic aquí.
5. RESUMEN
- Los dispositivos Vector T7 presentaron una RMSD baja para las medidas de velocidad y aceleración y una MAD baja para las medidas de distancia durante los ensayos de movimiento que implicaban altas tasas de aceleración, desaceleración y cambio de dirección.
- Los dispositivos Vector T7 mostraron una RMSD baja similar para las medidas de aceleración en todos los ensayos de movimiento, con la excepción de un cambio de dirección de 180 grados, en el que la RMSD fue ligeramente superior. Es probable que esto se deba a que los movimientos de este ensayo implicaban mayores tasas de aceleración/desaceleración y sugiere que el error aumenta a medida que aumenta la tasa de cambio de velocidad. No obstante, este error puede considerarse bajo (RMSD media de 1,24).
- La colocación del chaleco dio como resultado el error más bajo para las medidas de velocidad, aceleración y distancia, mientras que la colocación del dispositivo en la parte delantera de la cintura dio como resultado el error más alto. Independientemente de la colocación del dispositivo, todas las ubicaciones dieron lugar a un error bajo en todas las medidas, con todos los RMSD ≤ 0,85.
- La estabilidad posicional de los dispositivos Vector T7 en reposo fue alta, con una distancia media entre muestras de ~1-2 mm.
- El bajo error sugiere que el dispositivo Vector T7 utilizado junto con ClearSky proporciona una medida válida de la velocidad, la aceleración y la distancia durante tareas específicas de deportes de equipo, incluidos los esfuerzos lineales máximos y los movimientos de cambio de dirección.
→ Descargue este Libro Blanco de Vector T7 haciendo clic aquí.
6. REFERENCIAS
- Malone, J. J., Lovell, R., Varley, M. C., & Coutts, A. J. (2017). Desembalando la caja negra: aplicaciones y consideraciones para el uso de dispositivos GPS en el deporte. Revista internacional de fisiología y rendimiento deportivos, 12(s2), S2-18.
- Linke, D., Link, D., & Lames, M. (2018). Validación de los sistemas electrónicos de rendimiento y seguimiento EPTS en condiciones de campo. PloS one, 13(7), e0199519.
- Linke, D., Link, D., & Lames, M. (2020). Validez específica para el fútbol de los sistemas de seguimiento óptico por vídeo de TRACAB. PloS one, 15(3), e0230179.
- Luteberget, L. S., Spencer, M., & Gilgien, M. (2018). Validez del sistema de posicionamiento local Catapult ClearSky T6 para ejercicios específicos de deportes de equipo, en condiciones de interior. Fronteras de la fisiología, 9, 115.
- Serpiello, F. R., Hopkins, W. G., Barnes, S., Tavrou, J., Duthie, G. M., Aughey, R. J., & Ball, K. (2018). Validez de un sistema de posicionamiento local de banda ultraancha para medir la locomoción en deportes de interior. Revista de ciencias del deporte, 36(15), 1727-1733.
- Hodder, R. W., Ball, K. A., & Serpiello, F. R. (2020). Criterion validity of Catapult ClearSky T6 local positioning system for measuring inter-unit distance. Sensors, 20(13), 3693.
- R Core Team (2021). R: Un lenguaje y un entorno para la computación estadística. R Foundation for Statistical Computing, Viena, Austria. URL https://www.R-project.org/
- Van Boxtel, G.J.M., Laboissière, R., & Wilhelm, H.D. (2021). gsignal: Procesamiento de señales. URL: https://github.com/gjmvanboxtel/gsignal
→ Descargue este Libro Blanco de Vector T7 haciendo clic aquí.