Biała księga: Wektor walidacyjny T7
Matthew C. Varley, Susanne Ellens, David Carey. Sport, Performance, and Nutrition Research Group, School of Allied Health, Human Services, & Sport, La Trobe University, Melbourne, VIC, Australia.
1. WPROWADZENIE
Systemy śledzenia sportowców stały się niezbędnym narzędziem w sporcie. Systemy te pozwalają praktykom na ilościowe określenie i analizę ruchu sportowców w celu lepszego zrozumienia obciążenia treningowego, wydajności fizycznej, zachowań taktycznych i ryzyka kontuzji.1
Chociaż dostępnych jest wiele systemów śledzenia, większość z nich ma ograniczenia, gdy są używane w pomieszczeniach. Lokalny system pozycjonowania ClearSky(LPS) to technologia, która zapewnia śledzenie i pomiar wydajności sportowców w środowiskach wewnętrznych. W szczególności, system generuje dane wyjściowe dotyczące pozycji i metryk zależnych od pozycji, takich jak odległość, prędkość i przyspieszenie.
Vector T7 to nowe urządzenie do noszenia, które jest używane z systemem ClearSky. Vector T7 jest podobny do poprzednich urządzeń używanych z ClearSky (Vector S7 i Catapult T6), z częstotliwością próbkowania 10 Hz.
Jednak Vector T7 wykorzystuje protokół Time Difference of Arrival (TDOA) do określania pozycji, podczas gdy poprzednie urządzenia wykorzystują protokół Two Way Ranging (TWR). Zaletą protokołu TDOA jest to, że wymaga on znacznie niższego zużycia energii przez urządzenie w porównaniu z protokołem TWR, przy jednoczesnym zachowaniu dokładności danych pozycyjnych.
Ta redukcja mocy umożliwia zmniejszenie rozmiaru urządzenia. Mniejszy rozmiar urządzenia pozwala na noszenie Vector T7 w kilku pozycjach na sportowcu, w tym w tradycyjnym miejscu między łopatkami lub w talii.
Systemy śledzenia sportowców wymagają walidacji ich zdolności do pomiaru ruchu sportowca, aby praktycy mieli zaufanie do danych umożliwiających im podejmowanie decyzji dotyczących treningu i praktyk meczowych. Podobnie jak w przypadku wszystkich technologii, producenci będą z czasem wydawać zaktualizowane modele, w miarę wprowadzania ulepszeń zarówno w sprzęcie, jak i algorytmach.
Każdy nowy model wymaga walidacji w celu określenia zdolności nowego urządzenia do pomiaru tego, co ma mierzyć (np. pozycji, prędkości i przyspieszenia).1 Zazwyczaj odbywa się to poprzez porównanie danych z urządzenia z kryterium pomiaru. System Vicon to system kamer do przechwytywania ruchu uważany za złoty standard pomiaru pozycji. System Vicon jest często wykorzystywany jako kryterium pomiaru w walidacji technologii śledzenia sportowców.2, 3
Badania oceniły przydatność urządzeń Catapult T6 do pomiaru odległości, prędkości i przyspieszenia podczas zadań specyficznych dla sportów zespołowych, w tym maksymalnych wysiłków liniowych i ruchów zmiany kierunku.4,5,6
W badaniach tych wykorzystano system kamer do przechwytywania ruchu (Vicon lub Qualisys Oqus) jako kryterium pomiaru, przy czym we wszystkich badaniach stwierdzono, że urządzenia Catapult T6 mają akceptowalną ważność do oceny ruchu sportowca. Biorąc pod uwagę, że Vector T7 został opracowany dopiero niedawno, wymagana jest walidacja tego urządzenia.
Dlatego celem tego badania była ocena przydatności nowych urządzeń Vector T7 do pomiaru odległości, prędkości i przyspieszenia.
→ Pobierz białą księgę Vector T7, klikając tutaj.

2. METODY
W badaniu wzięło udział sześciu aktywnych rekreacyjnie mężczyzn (28,8 ± 5,6 lat). Wszyscy uczestnicy wyrazili pisemną zgodę na udział w badaniu, a zastosowane procedury zostały przeprowadzone za zgodą Komisji Etyki Badań Człowieka Uniwersytetu La Trobe.
Zbieranie danych przeprowadzono w hali sportowej o wymiarach 40 x 70 m, która składała się z trzech boisk do koszykówki. Uczestnicy wykonali siedem różnych prób ruchowych na obszarze 20 x 5 m na jednym z boisk do koszykówki. Podczas prób dane o ruchach graczy były zbierane za pomocą LPS (Catapult ClearSky, Catapult, Melbourne, Australia) i 20-kamerowego systemu analizy ruchu (Vantage, Vicon Motion Systems, Oxford, Wielka Brytania).
Opis i schemat każdej próby przedstawiono w tabeli 1 i na rysunku 1. Uczestnicy zostali poproszeni o wykonanie wszystkich prób z maksymalną intensywnością i całkowite zatrzymanie się pod koniec próby (spowolnienie). Przed rozpoczęciem próby uczestnicy wykonali 5-minutową rozgrzewkę. Każda próba ruchowa została wykonana dwukrotnie, co dało łącznie 14 prób, z których każda była oddzielona od siebie o ~3 minuty.
Uczestnicy zostali wyposażeni w cztery urządzenia Vector T7 umieszczone w czterech różnych miejscach. Jedno urządzenie zostało umieszczone między łopatkami uczestnika przy użyciu kamizelki dostarczonej przez producenta.
Pozostałe trzy urządzenia zostały umieszczone wokół talii uczestników, w szczególności z przodu (przekrój przez punkt środkowy między dwoma przednimi górnymi kolcami biodrowymi), po lewej stronie (przekrój przez punkt środkowy między przednimi i tylnymi górnymi kolcami biodrowymi) i z tyłu (przekrój przez punkt środkowy między dwoma tylnymi górnymi kolcami biodrowymi) w niestandardowym klipsie dostarczonym przez producenta, który przypinał się do szortów uczestników.
Niezależnie od prób ruchowych przeprowadzono próbę statyczną w celu oceny urządzeń Vector T7 pod kątem stabilności ich pozycjonowania przy użyciu protokołu stałego umieszczenia. Każde z trzech urządzeń zostało umieszczone na statywie (na wysokości 1,5 m) i pozostawione na 10 minut w celu zebrania danych. Dwa urządzenia zostały umieszczone na środku boiska środkowego, a jedno na szerokiej krawędzi boiska.
System ClearSky LPS został zainstalowany wokół hali sportowej i składał się z 21 węzłów kotwiczących zamocowanych na średniej wysokości 8,4 m od podłoża, ze średnią odległością 10,4 m między każdym węzłem. Dane były rejestrowane z częstotliwością 10 Hz i przetwarzane przy użyciu oprogramowania producentaOpenField w wersji 3.9.0). Dane dotyczące prędkości, przyspieszenia, pozycji x-y i odometru (skumulowana odległość) zostały wyeksportowane dla każdej próby w celu dalszej analizy.
Jako kryterium pomiaru odległości, prędkości i przyspieszenia wykorzystano 20-kamerowy system analizy ruchu (Vicon) próbkujący z częstotliwością 100 Hz. Kamery zamontowano na statywach i umieszczono w odległości 3 m od obwodu obszaru, w którym przeprowadzano próby ruchowe. Cztery odblaskowe znaczniki o średnicy 32 mm zostały umieszczone na zewnętrznej stronie dostarczonej przez producenta kamizelki i każdego klipsa do pasa zawierającego urządzenia Vector T7, zgodnie ze środkiem każdego urządzenia.
Dane Vicon zostały oznaczone i przetworzone za pomocą oprogramowania Vicon Nexus 2.14. Przetwarzanie surowych danych Vicon polegało na filtrowaniu przy użyciu dolnoprzepustowego filtra Butterwortha czwartego rzędu z częstotliwością odcięcia 3 Hz, która została określona na podstawie analizy resztkowej. Luki w danych ≤50 ms (5 próbek) zostały wypełnione przy użyciu interpolacji spline, luki ≥50 ms zostały wykluczone z analizy. Do analizy wykorzystano współrzędne XY przefiltrowanych danych Vicon 100 Hz, współrzędne z (przemieszczenie pionowe) zostały pominięte w obliczeniach, ponieważ ClearSky został skonfigurowany do pozycjonowania dwuwymiarowego (2D).
Dla każdego z czterech markerów Vicon w każdej próbie ruchu (n=320) prędkość 2D została obliczona poprzez zróżnicowanie danych pozycyjnych i zastosowanie tego samego filtra, który został użyty w oprogramowaniu producenta do danych LPS. Informacje te zostały dostarczone badaczom przez producenta; jednak szczegóły nie zostały tutaj uwzględnione ze względu na własność intelektualną producenta. Podobnie, przyspieszenie zostało obliczone poprzez zróżnicowanie danych prędkości i filtrowanie przy użyciu specyfikacji producenta.
Metryki pochodzące z Vicon były próbkowane w dół do 10 Hz, a następnie synchronizowane z danymi Catapult poprzez korelację krzyżową sygnałów prędkości w celu znalezienia przesunięcia czasowego, które zmaksymalizowało korelację. Całe przetwarzanie i analizę danych przeprowadzono przy użyciu języka programowania statystycznego R (wersja 4.0.4)7 i pakietu gsignal8.
Tabela 1. Opis prób ruchowych
| Próba # | Opis |
| 1 | 5 m sprint liniowy |
| 2 | 10 m sprint liniowy |
| 3 | 20 m sprint liniowy |
| 4 | 5-metrowy sprint liniowy do 45-stopniowej zmiany kierunku do 5-metrowego sprintu liniowego |
| 5 | 5 m sprint liniowy do 90-stopniowej zmiany kierunku do 5 m sprintu liniowego |
| 6 | 5 m sprint liniowy do zmiany kierunku o 180 stopni do 5 m sprint liniowy |
| 7 | Obwód obejmujący kombinację sprintów liniowych i zmian kierunków. |
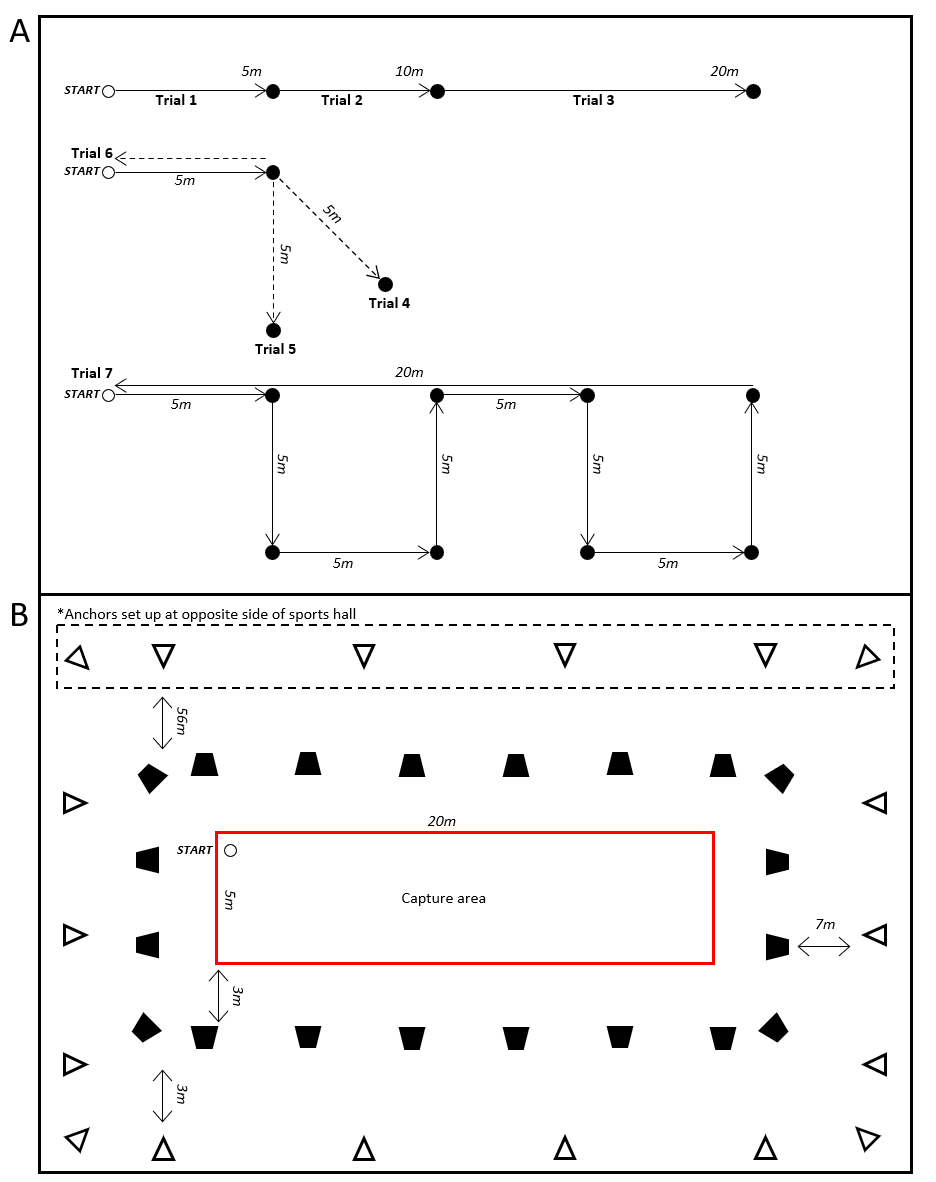
Rysunek 1. A ) Schemat siedmiu różnych prób ruchu. B) Konfiguracja podczas zbierania danych, wszystkie próby rozpoczęły się od początkowego punktu odniesienia (białe kółko), kamery Vicon (czarny trapez), węzły kotwiczące ClearSky (białe trójkąty). Uwaga: Cała hala sportowa (40 x 70 m nie jest pokazana w całości dla przejrzystości).
→ Pobierz białą księgę Vector T7, klikając tutaj.

3. ANALIZA STATYSTYCZNA
Próby ruchowe
Następujące wskaźniki zostały obliczone dla każdej próby porównującej dane pochodzące z Vector T7 i Vicon; pierwiastkowa średnia różnica standardowa (RMSD) dla prędkości i przyspieszenia oraz średnia różnica bezwzględna (MAD) dla odległości pozycyjnej między próbkami. Próby Vicon, w których brakowało więcej niż 10% danych, zostały wykluczone z analiz (n = 12) ze względu na wprowadzenie efektów krawędziowych przez podejście filtrujące, w którym występowały luki w danych. Wyniki przedstawiono jako średnią, medianę i przedziały międzykwartylowe (IQR) dla każdej metryki, we wszystkich próbach i stratyfikowane według lokalizacji urządzenia i typu ruchu.
Próby statyczne
W przypadku prób z urządzeniami statycznymi obliczono odległość i przemieszczenie między próbkami. Wyniki przedstawiono jako średnią, medianę, IQR i skumulowaną sumę odległości oraz przemieszczenia od pierwszej do ostatniej próbki w 10-minutowym badaniu. Metryka producenta "licznik kilometrów" została uwzględniona w wynikach dla każdego urządzenia jako punkt odniesienia dla obliczonej przebytej odległości.
4. WYNIKI
Próby ruchowe
Różnice między ClearSky LPS a prędkością uzyskaną z Vicon przedstawiono w tabeli 2 i na rysunku 2. Spośród czterech testowanych pozycji urządzenia, urządzenie noszone w kamizelce miało najmniejszą średnią i medianę RMSD, a urządzenie noszone z przodu talii najwyższą.
Obserwacja ta została powtórzona dla RMSD w przyspieszeniu(Tabela 3 i Rysunek 2). Próby ruchu liniowego charakteryzowały się największą zgodnością między metodami dla prędkości. Próba zmiany kierunku ruchu o1800 skutkowała najwyższymi wartościami RMSD dla przyspieszenia.
Tabela 2. RMSD prędkości (m-s-1) między urządzeniami Catapult a systemem analizy ruchu Vicon.
| N | Średnia | Mediana | IQR | ||
| Wszystkie | 308 | 0.19 | 0.14 | 0.11 - 0.21 | |
| Lokalizacja urządzenia | Kamizelka | 79 | 0.14 | 0.12 | 0.09 - 0.15 |
| Powrót | 77 | 0.20 | 0.15 | 0.12 - 0.22 | |
| Przód | 76 | 0.24 | 0.17 | 0.14 - 0.27 | |
| Lewa strona | 76 | 0.18 | 0.13 | 0.11 - 0.18 | |
| Typ ruchu | Liniowy | 140 | 0.17 | 0.12 | 0.09 - 0.18 |
| COD 45 | 44 | 0.27 | 0.22 | 0.14 - 0.32 | |
| COD 90 | 43 | 0.18 | 0.15 | 0.11 - 0.20 | |
| COD 180 | 48 | 0.18 | 0.14 | 0.13 - 0.17 | |
| Obwód | 33 | 0.22 | 0.18 | 0.17 - 0.24 |
Tabela 3. Przyspieszenie RMSD (m-s-2) między urządzeniami Catapult a systemem analizy ruchu Vicon.
| N | Średnia | Mediana | IQR | ||
| Wszystkie | 308 | 0.79 | 0.76 | 0.64 - 0.91 | |
| Lokalizacja urządzenia | Kamizelka | 79 | 0.75 | 0.74 | 0.62 - 0.81 |
| Powrót | 77 | 0.77 | 0.76 | 0.60 - 0.91 | |
| Przód | 76 | 0.85 | 0.83 | 0.66 - 0.97 | |
| Lewa strona | 76 | 0.79 | 0.79 | 0.65 - 0.88 | |
| Typ ruchu | Liniowy | 140 | 0.69 | 0.73 | 0.60 - 0.81 |
| COD 45 | 44 | 0.67 | 0.67 | 0.48 - 0.87 | |
| COD 90 | 43 | 0.75 | 0.74 | 0.66 - 0.85 | |
| COD 180 | 48 | 1.24 | 1.25 | 1.16 - 1.32 | |
| Obwód | 33 | 0.77 | 0.80 | 0.73 - 0.86 |
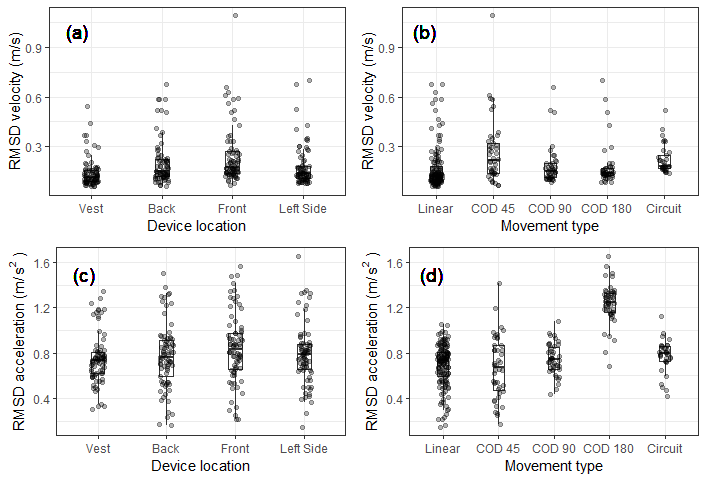
Rysunek 2. Wyniki RMSD prędkości (pierwszy wiersz) i przyspieszenia (drugi wiersz) dla każdej próby, z podziałem na lokalizację urządzenia (pierwsze kolumny) i rodzaj ruchu (druga kolumna).
Tabela 4 pokazuje MAD w odległości między próbkami uzyskanej z danych śledzenia pozycji Vector T7 i Vicon. We wszystkich próbach średnia różnica wynosiła 0,39 m, różnice były większe w przypadku urządzenia noszonego z przodu talii i podczas próby ruchu po obwodzie.
Tabela 4. MAD w odległości między próbkami (m) między urządzeniami Catapult a systemem analizy ruchu Vicon.
| N | Średnia | Mediana | IQR | ||
| Wszystkie | 308 | 0.04 | 0.03 | 0.02 - 0.05 | |
| Lokalizacja urządzenia | Kamizelka | 79 | 0.03 | 0.03 | 0.02 - 0.04 |
| Powrót | 77 | 0.04 | 0.03 | 0.02 - 0.04 | |
| Przód | 76 | 0.05 | 0.04 | 0.03 - 0.06 | |
| Lewa strona | 76 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Typ ruchu | Liniowy | 140 | 0.03 | 0.03 | 0.02 - 0.04 |
| COD 45 | 44 | 0.04 | 0.04 | 0.03 - 0.05 | |
| COD 90 | 43 | 0.04 | 0.03 | 0.03 - 0.04 | |
| COD 180 | 48 | 0.04 | 0.03 | 0.03 - 0.04 | |
| Obwód | 33 | 0.07 | 0.06 | 0.05 - 0.09 |
Próby statyczne
Mediana i IQR odległości między próbkami dla wszystkich urządzeń stacjonarnych wynosiła zero(Tabela 5), co wskazuje, że w większości kroków czasowych urządzenia nie zmieniały swoich współrzędnych x lub y.
Urządzenia zarejestrowały jednak pewne zmiany położenia, tak że średnia odległość między próbkami wynosiła około 1-2 mm. W ciągu 10 minut nie było silnego odchylenia kierunkowego, a ostateczna lokalizacja urządzeń była bardzo zbliżona do ich początkowych pozycji (końcowe przemieszczenie rzędu kilku centymetrów).
Zastrzeżone przetwarzanie i filtrowanie danych zawarte w obliczeniach skumulowanej odległości (zmienna "odometer") producenta było w stanie skorygować niewielkie zmiany pozycji i zwróciło całkowite odległości mniejsze niż 0,02 m.
Tabela 5. Wyniki testów statycznych (trzy urządzenia pozostawione w bezruchu przez 10 minut).
| Pochodzi z pozycji x, y | |||||
| Odległość między kolejnymi próbkami (m) | Przemieszczenie przy próbce końcowej (m) | Licznik kilometrów przy próbce końcowej (m) | |||
| Urządzenie | Średnia | Mediana | IQR | ||
| Wszystkie | 0.001898 | 0 | 0 - 0 | ||
| 1 | 0.001644 | 0 | 0 - 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 - 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 - 0 | (-0.06, -0.05) | 0.01 |
→ Pobierz białą księgę Vector T7, klikając tutaj.
5. PODSUMOWANIE
- Urządzenia Vector T7 charakteryzowały się niskim RMSD dla pomiarów prędkości i przyspieszenia oraz niskim MAD dla pomiarów odległości podczas prób ruchowych obejmujących wysokie prędkości przyspieszania, zwalniania i zmiany kierunku.
- Urządzenia Vector T7 wykazywały podobny niski RMSD dla pomiarów przyspieszenia we wszystkich próbach ruchu, z wyjątkiem zmiany kierunku o 180 stopni, gdzie RMSD był nieco wyższy. Jest to prawdopodobnie spowodowane tym, że ruchy w tej próbie obejmowały wyższe prędkości przyspieszania/zwalniania i sugeruje, że błąd wzrasta wraz ze wzrostem prędkości. Błąd ten można jednak nadal uznać za niski (średni RMSD wynoszący 1,24).
- Umieszczenie kamizelki skutkowało najniższym błędem dla pomiarów prędkości, przyspieszenia i odległości, podczas gdy umieszczenie urządzenia z przodu talii skutkowało najwyższym błędem. Niezależnie od umiejscowienia urządzenia, wszystkie lokalizacje skutkowały niskim błędem we wszystkich pomiarach z RMSD ≤ 0,85.
- Stabilność pozycjonowania urządzeń Vector T7 podczas postoju była wysoka, a średnia odległość między próbkami wynosiła ~ 1-2 mm.
- Niski błąd sugeruje, że urządzenie Vector T7 używane w połączeniu z ClearSky zapewnia prawidłowy pomiar prędkości, przyspieszenia i odległości podczas zadań specyficznych dla sportów zespołowych, w tym maksymalnych wysiłków liniowych i ruchów zmiany kierunku.
→ Pobierz białą księgę Vector T7, klikając tutaj.
6. ODNIESIENIA
- Malone, J. J., Lovell, R., Varley, M. C., & Coutts, A. J. (2017). Rozpakowywanie czarnej skrzynki: zastosowania i rozważania dotyczące korzystania z urządzeń GPS w sporcie. International journal of sports physiology and performance, 12(s2), S2-18.
- Linke, D., Link, D., & Lames, M. (2018). Walidacja elektronicznych systemów wydajności i śledzenia EPTS w warunkach terenowych. PloS one, 13(7), e0199519.
- Linke, D., Link, D., & Lames, M. (2020). Ważność optycznych systemów śledzenia wideo TRACAB dla piłki nożnej. PloS one, 15(3), e0230179.
- Luteberget, L. S., Spencer, M., & Gilgien, M. (2018). Ważność lokalnego systemu pozycjonowania Catapult ClearSky T6 dla ćwiczeń specyficznych dla sportów zespołowych w warunkach wewnętrznych. Frontiers in physiology, 9, 115.
- Serpiello, F. R., Hopkins, W. G., Barnes, S., Tavrou, J., Duthie, G. M., Aughey, R. J., & Ball, K. (2018). Ważność ultraszerokopasmowego lokalnego systemu pozycjonowania do pomiaru lokomocji w sportach halowych. Journal of sports sciences, 36(15), 1727-1733.
- Hodder, R. W., Ball, K. A., & Serpiello, F. R. (2020). Kryterium ważności lokalnego systemu pozycjonowania Catapult ClearSky T6 do pomiaru odległości między jednostkami. Sensors, 20(13), 3693.
- R Core Team (2021). R: Język i środowisko do obliczeń statystycznych. R Foundation for Statistical Computing, Wiedeń, Austria. URL https://www.R-project.org/
- Van Boxtel, G.J.M., Laboissière, R., & Wilhelm, H.D. (2021). gsignal: Przetwarzanie sygnałów. URL: https://github.com/gjmvanboxtel/gsignal