Технический документ: Вектор проверки T7
Мэтью С. Варли, Сюзанна Элленс, Дэвид Кэри. Группа исследования спорта, производительности и питания, Школа смежного здравоохранения, социальных услуг и спорта, Университет Ла Троб, Мельбурн, Виктория, Австралия.
1. ВВЕДЕНИЕ
Системы отслеживания спортсменов стали важным инструментом в спорте. Эти системы позволяют практикующим специалистам количественно оценивать и анализировать движения спортсменов, чтобы лучше понять тренировочную нагрузку, физическую работоспособность, тактическое поведение и риск травм.1
Хотя доступно множество систем слежения, большинство из них имеют ограничения при использовании в помещении. Система локального позиционирования ClearSky (ЛПС) — это технология, которая обеспечивает отслеживание и измерение результатов спортсменов в закрытых помещениях. В частности, система выводит данные о местоположении и производные от него показатели, такие как расстояние, скорость и ускорение.
The Вектор Т7 — это новое носимое устройство, которое используется с системой ClearSky. Vector T7 аналогичен предыдущим устройствам, использовавшимся с ClearSky (Vector S7 и Catapult T6), с частотой дискретизации 10 Гц.
Однако Вектор Т7 использует протокол разницы во времени прибытия (TDOA) для определения местоположения, тогда как предыдущие устройства использовали протокол двустороннего измерения диапазона (TWR). Преимущество протокола TDOA заключается в том, что он требует значительно меньшего энергопотребления устройства по сравнению с протоколом TWR, сохраняя при этом точность позиционных данных.
Такое снижение мощности позволяет уменьшить размер устройства. Меньший размер устройства позволяет Вектор Т7 носить на спортсмене в нескольких положениях, включая традиционное размещение между лопатками или на талии.
Системы отслеживания спортсменов требуют подтверждения их способности измерять движения спортсменов, чтобы практикующие специалисты были уверены в данных, позволяющих им принимать решения о тренировках и матчах. Как и в случае со всеми технологиями, производители будут выпускать обновленные модели с течением времени по мере улучшения как аппаратного обеспечения устройств, так и лежащих в их основе алгоритмов.
Каждая новая модель требует проверки для определения способности нового устройства измерять то, что предназначено для измерения (например, положение, скорость и ускорение).1 Обычно это делается путем сравнения данных устройства с критериальной мерой. Система Vicon — это система камер захвата движения, которая считается золотым стандартом измерения положения. Vicon обычно используется в качестве критерия при проверке технологии отслеживания спортсменов.2, 3
Исследования оценили эффективность устройств Catapult T6 для измерения расстояния, скорости и ускорения во время выполнения конкретных задач командного спорта, включая линейные максимальные усилия и движения с изменением направления.4,5,6
В этих исследованиях в качестве критерия использовалась система камеры захвата движения (Vicon или Qualisys Oqus), и все исследования пришли к выводу, что Катапульта Т6 устройства имели приемлемую достоверность для оценки движений спортсменов. Поскольку Vector T7 был разработан совсем недавно, требуется валидация этого устройства.
Поэтому целью данного исследования было оценить обоснованность нового Вектор Т7 устройства для измерения расстояния, скорости и ускорения.
→ Загрузите этот информационный документ Vector T7, нажав здесь.

2. МЕТОДЫ
В этом исследовании приняли участие шесть рекреационно-активных участников мужского пола (28,8 ± 5,6 лет). Все участники предоставили письменное согласие на участие в исследовании, а используемые процедуры проводились с одобрения Комитета по этике исследований на людях Университета Ла Троб.
Сбор данных проводился в спортивном зале размером 40 х 70 м, который состоял из трех баскетбольных площадок. Участники выполнили семь различных пробных движений на площадке размером 20 х 5 м на одной из баскетбольных площадок. Во время испытаний данные о перемещениях игроков собирались с помощью LPS (Catapult ClearSky, Catapult, Мельбурн, Австралия) и системы анализа движения с 20 камерами (Vantage, Vicon Motion Systems, Оксфорд, Великобритания).
Описание и схема каждого испытания приведены на рис. Таблица 1 и Рисунок 1. Участникам было предложено выполнить все испытания с максимальной интенсивностью и полностью остановиться в конце испытания (замедление). Перед началом испытания участники выполнили 5-минутную разминку. Каждое испытание на движение выполнялось дважды, всего 14 попыток, каждое из которых было разделено примерно на 3 минуты.
Участникам были предоставлены четыре Вектор Т7 устройства расположены в четырех разных местах. Одно устройство было помещено между лопатками участника с помощью жилета, поставляемого производителем.
Остальные три устройства располагались вокруг талии участников, а именно спереди (поперечное сечение средней точки между двумя передними верхними подвздошными остями), слева (поперечное сечение средней точки между передней и задней верхними подвздошными остями) и сзади ( поперечное сечение средней точки между двумя задними верхними подвздошными остями) в специальной застежке на поясе, поставляемой производителем и прикрепляемой к шортам участников.
Отдельно от испытаний на движение было проведено статическое испытание для оценки Вектор Т7 устройства для стабильности их позиционирования с использованием протокола фиксированного размещения. Каждое из трех устройств было помещено на штатив (высота 1,5 м) и оставлено для сбора данных в течение 10 минут. Из устройств два были размещены в центре средней площадки, а одно - на широком краю площадки.
The КлирСкай ЛПС был установлен вокруг спортивного зала и состоял из 21 анкерного узла, закрепленного на средней высоте 8,4 м от земли со средним расстоянием между каждым узлом 10,4 м. Данные собирались с частотой 10 Гц и обрабатывались с использованием программного обеспечения производителя (версия OpenField 3.9.0). Данные о скорости, ускорении, положении xy и одометре (совокупное расстояние) экспортировались для каждого испытания для дальнейшего анализа.
В качестве критерия измерения расстояния, скорости и ускорения использовалась 20-камерная система анализа движения (Vicon) с частотой дискретизации 100 Гц. Камеры были установлены на штативах и размещены на расстоянии 3 м от периметра площадки, где проводились испытания движения. Четыре светоотражающих маркера диаметром 32 мм были размещены на внешней стороне жилета, поставляемого производителем, и на каждом зажиме на поясе, содержащем устройства Vector T7, в соответствии с серединой каждого устройства.
Данные Vicon были помечены и обработаны с помощью Vicon Nexus 2.14. Обработка необработанных данных Vicon включала фильтрацию с использованием фильтра Баттерворта нижних частот четвертого порядка с частотой среза 3 Гц, которая была определена на основе остаточного анализа. Пропуски в данных <50 мс (5 выборок) заполнялись с помощью сплайн-интерполяции, пропуски ≥50 мс исключались из анализа. Для анализа использовались координаты XY отфильтрованных данных Vicon с частотой 100 Гц, координаты z (вертикальное смещение) в расчетах не учитывались, поскольку ClearSky был настроен для двумерного (2D) позиционирования.
Для каждого из четырех маркеров Vicon в каждом испытании движения (n=320) 2D-скорость рассчитывалась путем дифференцирования данных о положении и применения того же фильтра, который использовался в программном обеспечении производителя, к данным LPS. Эту информацию исследователям предоставил производитель; однако подробности здесь не приводятся ввиду интеллектуальной собственности производителя. Аналогичным образом, ускорение было рассчитано путем разграничения данных о скорости и фильтрации с использованием спецификаций производителя.
Показатели, полученные Vicon, были дискретизированы до 10 Гц, а затем синхронизированы с данными Catapult путем перекрестной корреляции сигналов скорости, чтобы найти сдвиг по времени, который максимизирует корреляцию. Вся обработка и анализ данных выполнялись с использованием языка статистического программирования R (версия 4.0.4).7 и пакет gsignal8.
Таблица 1. Описание двигательных испытаний
| Пробная версия # | Описание |
| 1 | Линейный спринт 5 м |
| 2 | Линейный спринт 10 м |
| 3 | Линейный спринт 20 м |
| 4 | Линейный спринт на 5 м в линейный спринт на 45 градусов. Изменение направления на линейный спринт на 5 м. |
| 5 | Линейный спринт на 5 м с изменением направления на 90 градусов на линейный спринт на 5 м. |
| 6 | Линейный спринт на 5 м на 180 градусов. Изменение направления на линейный спринт на 5 м. |
| 7 | Трасса, включающая комбинацию линейных спринтов и смены направлений. |
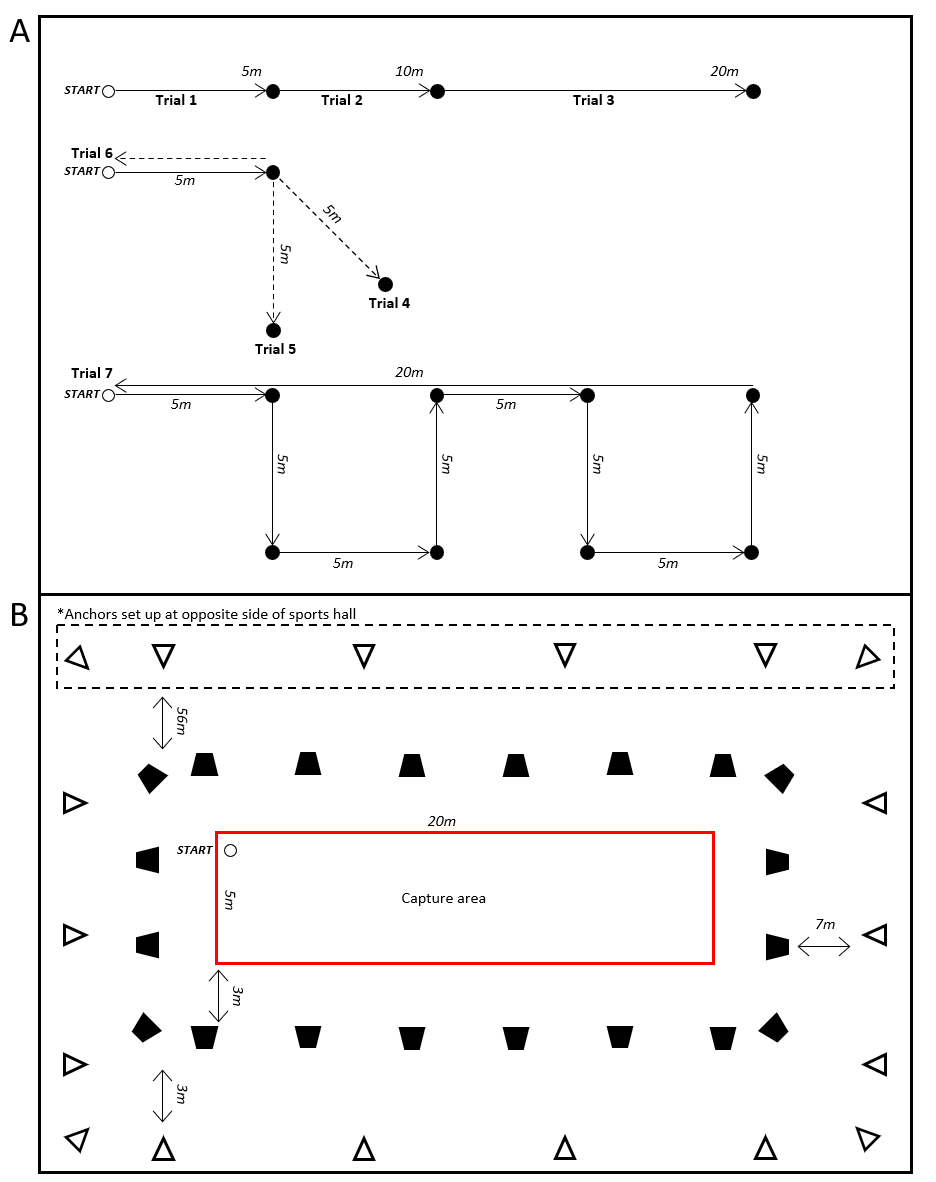
Рисунок 1. А) Схема семи различных упражнений на движение. Б) Настройка во время сбора данных, все испытания начинались с начальной контрольной точки (белый кружок), камер Vicon (черная трапеция), узлов привязки ClearSky (белые треугольники). Примечание. Весь спортивный зал (40 х 70 м показан не полностью для ясности).
→ Загрузите этот информационный документ Vector T7, нажав здесь.

3. СТАТИСТИЧЕСКИЙ АНАЛИЗ
Пробные движения
Следующие показатели были рассчитаны для каждого испытания, сравнивающего Вектор Т7 и данные, полученные Vicon; среднеквадратичная стандартная разность (RMSD) для скорости и ускорения и средняя абсолютная разность (MAD) для позиционного расстояния между образцами. Испытания Vicon, в которых отсутствовали данные более 10%, были исключены из анализа (n = 12) из-за появления краевых эффектов в результате подхода фильтрации, когда в данных существовали пробелы. Результаты представлены в виде среднего, медианного и межквартильного размаха (IQR) для каждого показателя во всех исследованиях и стратифицированы по местоположению устройства и типу движения.
Статические испытания
Для статических испытаний устройства рассчитывались позиционное расстояние и смещение между образцами. Результаты представлены в виде среднего значения, медианы, IQR и совокупного итога для расстояния и смещения от первой к последней выборке в 10-минутном исследовании. Показатель производителя «одометр» был включен в результаты для каждого устройства в качестве отправной точки для расчета пройденного расстояния.
4. ПОЛУЧЕННЫЕ РЕЗУЛЬТАТЫ
Пробные движения
Различия между скоростью ClearSky LPS и скоростью, полученной Vicon, показаны на рисунке. Таблица 2 и Рисунок 2. Из четырех протестированных положений устройства устройство, надетое на жилет, имело наименьшее среднее и медианное среднеквадратичное отклонение, а устройство, надетое на передней части пояса, - самое высокое.
Это наблюдение было повторено для СКО при ускорении (Таблица 3 и Рисунок 2). Испытания с линейным движением показали наибольшую согласованность между методами определения скорости. 1800 Пробное движение по изменению направления привело к самым высоким значениям СКО для ускорения.
Таблица 2. СКО скорости (м·с-1) между устройствами Catapult и системой анализа движения Vicon.
| Н | Иметь в виду | медиана | IQR | ||
| Все | 308 | 0.19 | 0.14 | 0.11 – 0.21 | |
| Местоположение устройства | Жилет | 79 | 0.14 | 0.12 | 0.09 – 0.15 |
| Назад | 77 | 0.20 | 0.15 | 0.12 – 0.22 | |
| Передний | 76 | 0.24 | 0.17 | 0.14 – 0.27 | |
| Левая сторона | 76 | 0.18 | 0.13 | 0.11 – 0.18 | |
| Тип движения | Линейный | 140 | 0.17 | 0.12 | 0.09 – 0.18 |
| наложенным платежом 45 | 44 | 0.27 | 0.22 | 0.14 – 0.32 | |
| наложенный платеж 90 | 43 | 0.18 | 0.15 | 0.11 – 0.20 | |
| ХПК 180 | 48 | 0.18 | 0.14 | 0.13 – 0.17 | |
| Схема | 33 | 0.22 | 0.18 | 0.17 – 0.24 |
Таблица 3. СКО ускорения (м·с-2) между устройствами Catapult и системой анализа движения Vicon.
| Н | Иметь в виду | медиана | IQR | ||
| Все | 308 | 0.79 | 0.76 | 0.64 – 0.91 | |
| Местоположение устройства | Жилет | 79 | 0.75 | 0.74 | 0.62 – 0.81 |
| Назад | 77 | 0.77 | 0.76 | 0.60 – 0.91 | |
| Передний | 76 | 0.85 | 0.83 | 0.66 – 0.97 | |
| Левая сторона | 76 | 0.79 | 0.79 | 0.65 – 0.88 | |
| Тип движения | Линейный | 140 | 0.69 | 0.73 | 0.60 – 0.81 |
| наложенным платежом 45 | 44 | 0.67 | 0.67 | 0.48 – 0.87 | |
| наложенный платеж 90 | 43 | 0.75 | 0.74 | 0.66 – 0.85 | |
| ХПК 180 | 48 | 1.24 | 1.25 | 1.16 – 1.32 | |
| Схема | 33 | 0.77 | 0.80 | 0.73 – 0.86 |
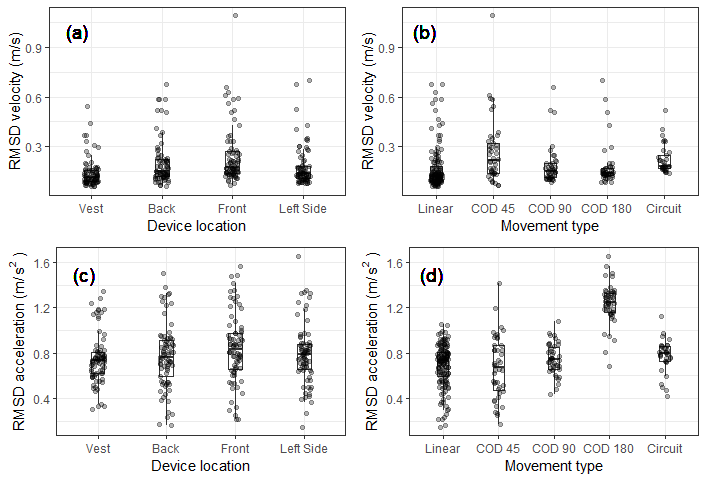
Фигура 2. Результаты RMSD скорости (первая строка) и ускорения (вторая строка) для каждого испытания, стратифицированные по местоположению устройства (первые столбцы) и типу движения (второй столбец).
Таблица 4 показывает MAD на расстоянии между образцами, полученное на основе данных отслеживания положения Vector T7 и Vicon. Во всех испытаниях средняя разница составила 0,39 м, различия были больше при использовании устройства, которое носили на передней части талии, и во время испытания кругового движения.
Таблица 4. MAD на расстоянии от образца к образцу (м) между устройствами Catapult и системой анализа движения Vicon.
| Н | Иметь в виду | медиана | IQR | ||
| Все | 308 | 0.04 | 0.03 | 0.02 – 0.05 | |
| Местоположение устройства | Жилет | 79 | 0.03 | 0.03 | 0.02 – 0.04 |
| Назад | 77 | 0.04 | 0.03 | 0.02 – 0.04 | |
| Передний | 76 | 0.05 | 0.04 | 0.03 – 0.06 | |
| Левая сторона | 76 | 0.04 | 0.03 | 0.03 – 0.04 | |
| Тип движения | Линейный | 140 | 0.03 | 0.03 | 0.02 – 0.04 |
| наложенным платежом 45 | 44 | 0.04 | 0.04 | 0.03 – 0.05 | |
| наложенный платеж 90 | 43 | 0.04 | 0.03 | 0.03 – 0.04 | |
| ХПК 180 | 48 | 0.04 | 0.03 | 0.03 – 0.04 | |
| Схема | 33 | 0.07 | 0.06 | 0.05 – 0.09 |
Статические испытания
Медиана и расстояние IQR от образца к образцу для всех стационарных устройств были равны нулю (Таблица 5), что указывает на то, что в большинстве временных шагов устройства не меняли свои координаты x или y.
Однако устройства все же зафиксировали некоторые изменения положения, так что среднее расстояние между образцами составило примерно 1-2 мм. В течение 10 минут не было сильного смещения направления, а окончательное местоположение устройств было очень близко к их исходным положениям (окончательное смещение порядка нескольких сантиметров).
Запатентованная обработка и фильтрация данных, включенная в расчет совокупного расстояния производителем (переменная «одометр»), позволила скорректировать небольшие изменения положения и получить общие расстояния менее 0,02 м.
Таблица 5. Результаты статических испытаний (три устройства оставались неподвижными на 10 минут).
| Получено из позиций x, y | |||||
| Расстояние между последовательными образцами (м) | Смещение по окончательному образцу (м) | Одометр на окончательном образце (м) | |||
| Устройство | Иметь в виду | медиана | IQR | ||
| Все | 0.001898 | 0 | 0 – 0 | ||
| 1 | 0.001644 | 0 | 0 – 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 – 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 – 0 | (-0.06, -0.05) | 0.01 |
→ Загрузите этот информационный документ Vector T7, нажав здесь.
5. РЕЗЮМЕ
- Вектор Т7 устройства имели низкое RMSD для измерения скорости и ускорения и низкое MAD для измерения расстояния во время испытаний на движение, включающих высокие скорости ускорения, замедления и изменения направления.
- Вектор Т7 устройства показали одинаково низкое СКО для показателей ускорения во всех испытаниях движения, за исключением изменения направления на 180 градусов, где СКО было немного выше. Вероятно, это связано с движениями в этом испытании, включающими более высокие скорости ускорения/замедления, и предполагает увеличение ошибки по мере увеличения скорости изменения скорости. Однако эту ошибку все же можно считать низкой (среднее СКО 1,24).
- Размещение жилета привело к наименьшей ошибке измерения скорости, ускорения и расстояния, тогда как размещение устройства на передней части талии привело к самой высокой ошибке. Независимо от размещения устройства во всех местоположениях наблюдалась низкая ошибка по всем измерениям со всеми RMSD ≤ 0,85.
- Стабильность положения приборов Vector T7 в неподвижном состоянии была высокой: среднее расстояние между образцами составляло ~1-2 мм.
- Низкая ошибка предполагает, что устройство Vector T7, используемое в сочетании с ClearSky, обеспечивает достоверное измерение скорости, ускорения и расстояния во время выполнения конкретных задач командного спорта, включая линейные максимальные усилия и движения с изменением направления.
→ Загрузите этот информационный документ Vector T7, нажав здесь.
6. ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
- Мэлоун, Джей-Джей, Ловелл, Р., Варли, MC, и Куттс, AJ (2017). Распаковка черного ящика: приложения и соображения по использованию GPS-устройств в спорте. Международный журнал спортивной физиологии и результативности, 12(с2), С2-18.
- Линке Д., Линк Д. и Лэймс М. (2018). Проверка работоспособности электронной системы и системы отслеживания ЭПТС в полевых условиях. ПлоС один, 13(7), е0199519.
- Линке Д., Линк Д. и Лэймс М. (2020). Применение оптических систем видеослежения TRACAB для футбола. ПлоС один, 15(3), е0230179.
- Лютебергет Л.С., Спенсер М. и Гилгиен М. (2018). Действительность системы локального позиционирования Catapult ClearSky T6 для тренировок по командным видам спорта в закрытых помещениях. Границы в физиологии, 9, 115.
- Серпиелло, Ф.Р., Хопкинс, В.Г., Барнс, С., Тавру, Дж., Дати, ГМ, Оги, Р.Дж., и Болл, К. (2018). Валидность сверхширокополосной системы локального позиционирования для измерения движений при занятиях спортом в закрытых помещениях. Журнал спортивных наук, 36(15), 1727-1733.
- Ходдер, РВ, Болл, К.А., и Серпьелло, Франция (2020). Критерий достоверности системы локального позиционирования Catapult ClearSky T6 для измерения расстояния между объектами. Датчики, 20(13), 3693.
- Основная команда R (2021 г.). Р: Язык и среда для статистических вычислений. Фонд статистических вычислений R, Вена, Австрия. URL https://www.R-project.org/
- Ван Бокстель, GJM, Лабуасьер, Р., и Вильгельм, HD (2021). gsignal: обработка сигналов. URL: https://github.com/gjmvanboxtel/gsignal
→ Загрузите этот информационный документ Vector T7, нажав здесь.