ホワイトペーパー: 検証ベクター T7
マシュー・C・ヴァーリー、スザンヌ・エレンズ、デヴィッド・ケアリー。オーストラリア、ビクトリア州メルボルンのラ・トローブ大学、アライド・ヘルス・ヒューマン・サービス・アンド・スポーツ学部、スポーツ、パフォーマンス、および栄養研究グループ。
1. はじめに
アスリート追跡システムはスポーツにとって不可欠なツールとなっています。これらのシステムにより、実践者はアスリートの動きを定量化して分析し、トレーニング負荷、身体パフォーマンス、戦術的行動、怪我のリスクをより深く理解できるようになります。1
多くの追跡システムが利用可能ですが、そのほとんどは屋内で使用する場合に制限があります。 ClearSky ローカル測位システム (LPS)は、屋内環境におけるアスリートのパフォーマンスの追跡と測定を提供するテクノロジーです。具体的には、システムは位置と、距離、速度、加速度などの位置から派生したメトリクスを出力します。
の ベクター T7 ClearSky システムで使用される新しいウェアラブル デバイスです。 Vector T7 は、ClearSky で使用されていた以前のデバイス (Vector S7 および Catapult T6) と同様で、サンプリング周波数は 10 Hz です。
しかし ベクター T7 以前のデバイスは Two Way Ranging (TWR) プロトコルを使用していましたが、位置を取得するために到着時間差 (TDOA) プロトコルを使用しました。 TDOA プロトコルの利点は、位置データの精度を維持しながら、TWR プロトコルと比較してデバイスの消費電力が大幅に低いことです。
この電力の削減により、デバイスのサイズを縮小することができます。デバイスのサイズが小さいため、 ベクター T7 従来の肩甲骨の間や腰の位置など、アスリートのさまざまな位置に着用できます。
アスリート追跡システムでは、実践者がデータに自信を持ってトレーニングや試合の練習について意思決定できるように、アスリートの動きを測定する能力の検証が必要です。すべてのテクノロジーと同様に、デバイスのハードウェアとその基盤となるアルゴリズムの両方が改善されるにつれて、メーカーは時間の経過とともに更新されたモデルをリリースします。
新しいモデルごとに、新しいデバイスが測定対象 (位置、速度、加速度など) を測定する能力を決定するための検証が必要です。1 これは通常、デバイスからのデータを基準測定値と比較することによって行われます。 Vicon システムは、位置測定のゴールドスタンダードとみなされているモーション キャプチャ カメラ システムです。 Vicon は、アスリート追跡テクノロジーの検証における基準尺度として使用されるのが一般的です。2, 3
研究では、線形最大努力や方向転換動作など、チームスポーツ特有のタスク中の距離、速度、加速度を測定するための Catapult T6 デバイスの有効性が評価されています。4,5,6
これらの研究では、モーション キャプチャ カメラ システム (Vicon または Qualisys Oqus) を基準尺度として使用し、すべての研究で次のことが結論付けられています。 カタパルト T6 デバイスはアスリートの動きを評価するのに許容可能な有効性を持っていました。 Vector T7 が開発されたばかりであることを考えると、このデバイスの検証が必要です。
したがって、この研究の目的は、新しい方法の妥当性を評価することでした。 ベクター T7 距離、速度、加速度を測定するための装置。
→ ここをクリックして、この Vector T7 ホワイト ペーパーをダウンロードしてください.

2. 方法
この研究には、レクリエーションに積極的な男性参加者 6 名 (28.8 ± 5.6 歳) が参加しました。すべての参加者は研究への参加について書面による同意を提出し、使用された手順はラ・トローブ大学の人間研究倫理委員会の承認を得て実施されました。
データ収集は、バスケットボール コート 3 面からなる 40 × 70 m の体育館で実施されました。参加者は、バスケットボール コートの 1 つ上の 20 x 5 m のエリアで 7 つの異なる動作トライアルを実行しました。トライアル中、プレーヤーの動きデータは、LPS (Catapult ClearSky、Catapult、オーストラリア、メルボルン) および 20 台のカメラ動作分析システム (Vantage、Vicon Motion Systems、オックスフォード、英国) を介して収集されました。
各試験の説明と概略図を以下に示します。 表1と図1。参加者は、すべてのトライアルを最大強度で実行し、トライアルの終わりに完全に停止する(減速)ように求められました。参加者は試験開始前に5分間のウォームアップを行った。各動作トライアルは 2 回実行され、各トライアルは約 3 分の間隔で合計 14 回のトライアルが行われました。
参加者は4つを装備していました ベクター T7 デバイスは 4 つの異なる場所に配置されます。メーカー提供のベストを使用して、1 つのデバイスを参加者の肩甲骨の間に配置しました。
残りの 3 つのデバイスは、参加者の腰の周囲、特に前部 (2 つの上前腸骨棘の間の中間点の断面)、左側 (前部と後部の上腸骨棘の間の中間点の断面)、および背面 ( 2 つの上後腸骨棘の間の中間点の断面図)、メーカーが提供するカスタム ウエストバンド クリップを参加者のショーツにクリップで留めます。
動きのトライアルとは別に、静的トライアルを実施して、 ベクター T7 固定配置プロトコルを使用して位置の安定性を実現するデバイス。 3 つのデバイスをそれぞれ三脚 (高さ 1.5 m) に置き、10 分間放置してデータを収集しました。デバイスのうち 2 つはミドルコートの中央に配置され、1 つはコートの広い端に配置されました。
の クリアスカイ LPS は体育館の周囲に設置され、地面から平均高さ 8.4 m、各ノード間の平均距離 10.4 m に固定された 21 個のアンカー ノードで構成されました。データは 10 Hz でキャプチャされ、製造元のソフトウェア (OpenField バージョン 3.9.0) を使用して処理されました。速度、加速度、xy 位置、オドメーター (累積距離) データは、さらなる分析のために各試行ごとにエクスポートされました。
100 Hz でサンプリングした 20 台のカメラ運動分析システム (Vicon) が、距離、速度、加速度の基準として使用されました。カメラは三脚に取り付けられ、移動試験が実行されたエリアの周囲から 3 m の位置に設置されました。直径 32 mm の 4 つの再帰反射マーカーが、メーカー提供のベストと Vector T7 デバイスを含む各ウエストバンド クリップの外側に、各デバイスの中央に対応して配置されました。
Vicon データは、Vicon Nexus 2.14 でラベル付けおよび処理されました。生の Vicon データのデータ処理は、残差分析に基づいて決定された 3Hz のカットオフ周波数を持つ 4 次ローパス バターワース フィルターを使用したフィルター処理で構成されています。データ内のギャップ ≤ 50 ms (5 つのサンプル) はスプライン補間を使用して埋められ、ギャップ ≥ 50 ms は分析から除外されました。フィルタリングされた 100 Hz Vicon データの XY 座標が分析に使用され、ClearSky が 2 次元 (2D) 測位用に構成されているため、Z 座標 (垂直変位) は計算では無視されました。
各動作トライアル (n=320) の 4 つの Vicon マーカーのそれぞれについて、位置データを差分し、メーカーのソフトウェアで使用されているのと同じフィルターを LPS データに適用することによって 2D 速度が計算されました。この情報は製造元から研究者に提供されました。ただし、メーカーの知的財産のため、詳細はここには記載されていません。同様に、加速度は、速度データを差分し、メーカーの仕様を使用してフィルタリングすることによって計算されました。
Vicon から導出されたメトリクスは 10Hz までダウンサンプリングされ、速度信号を相互相関させて相関を最大化する時間オフセットを見つけることによってカタパルト データと同期されました。すべてのデータ処理と分析は、R 統計プログラミング言語 (バージョン 4.0.4) を使用して実行されました。7 そしてgsignalパッケージ8.
表 1. 動作トライアルの説明
| トライアル# | 説明 |
| 1 | 5mリニアスプリント |
| 2 | 10m直線スプリント |
| 3 | 20m直線スプリント |
| 4 | 5 メートル直線スプリントから 45 度方向転換 5 メートル直線スプリント |
| 5 | 5 メートル直線スプリントから 90 度方向転換 5 メートル直線スプリント |
| 6 | 5 メートル直線スプリントから 180 度方向転換 5 メートル直線スプリント |
| 7 | 直線的なスプリントと方向転換を組み合わせたサーキット |
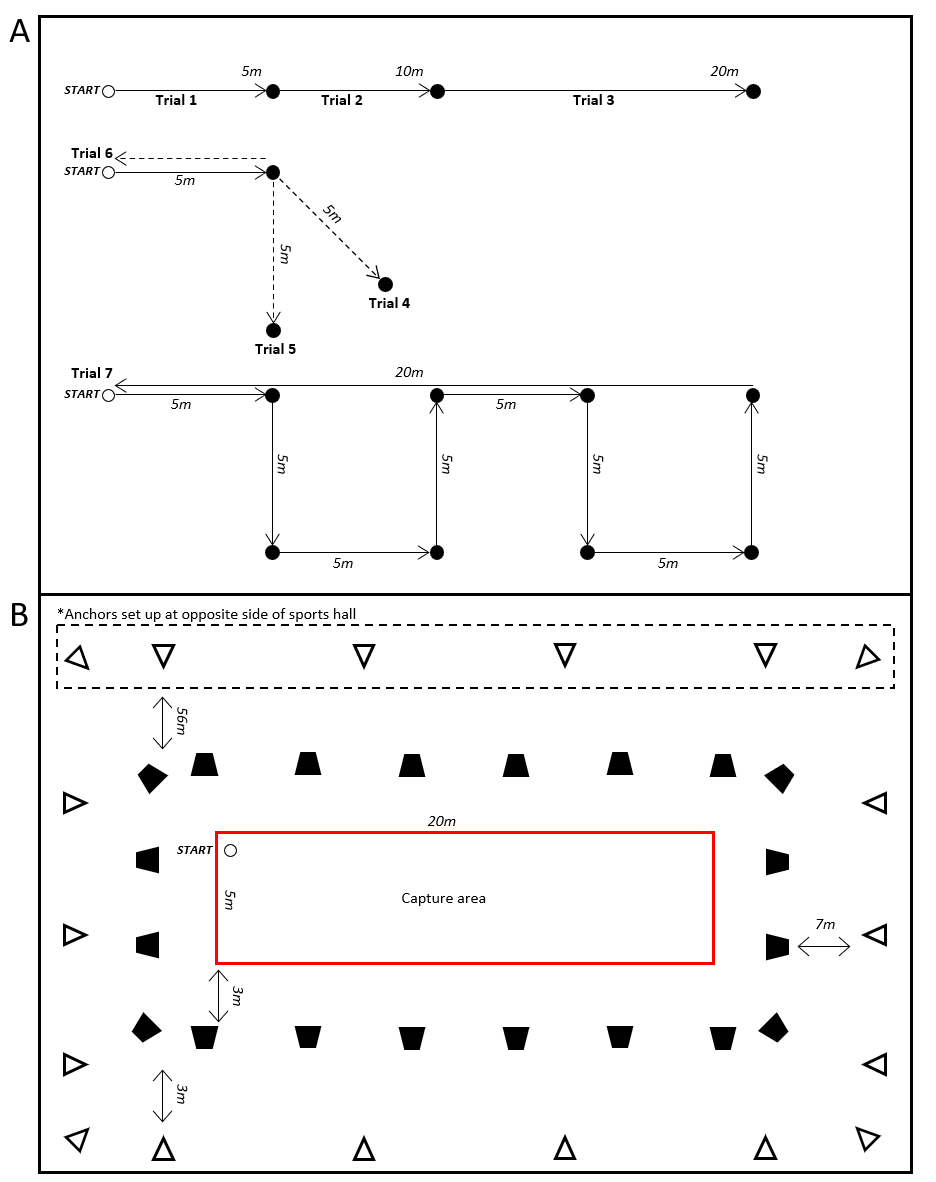
図 1.A) 7 つの異なる動作トライアルの概略図。 B) データ収集中のセットアップでは、すべてのトライアルは開始基準点 (白い円)、Vicon カメラ (黒い台形)、ClearSky アンカー ノード (白い三角形) から開始されました。注: スポーツ ホール全体 (わかりやすくするために 40 x 70m は完全には示されていません)。
→ ここをクリックして、この Vector T7 ホワイト ペーパーをダウンロードしてください.

3. 統計分析
動きのトライアル
以下の指標は、各試験で計算され、 ベクター T7 Vicon 由来のデータ。速度と加速度の場合は二乗平均標準差(RMSD)、サンプル間の位置距離の場合は平均絶対差(MAD)です。データにギャップが存在するフィルタリング手法によるエッジ効果の導入により、欠損データが 10% を超える Vicon 試験は分析から除外されました (n = 12)。結果は、すべての試験にわたる各指標の平均値、中央値、四分位範囲 (IQR) として表示され、デバイスの位置と移動タイプによって階層化されます。
静的トライアル
静的デバイスのトライアルでは、サンプル間の位置距離と変位が計算されました。結果は、平均、中央値、IQR、距離の累積合計、および 10 分間のトライアルにおける最初のサンプルから最後のサンプルまでの変位として表示されます。メーカーの測定基準である「オドメーター」は、計算された移動距離の基準点として各デバイスの結果に含まれています。
4. 結果
動きのトライアル
ClearSky LPS と Vicon から導出された速度の違いを以下に示します。 表2と図2。テストした 4 つのデバイスの位置のうち、ベストに着用したデバイスの平均 RMSD と中央値の RMSD が最も小さく、腰の前部に装着したデバイスの RMSD が最も高かった。
この観察は、加速時の RMSD に対しても繰り返されました (表3と図2)。直線運動のトライアルでは、速度に関する方法間で最も近い一致が見られました。 1800 方向転換動作の試行では、加速度の RMSD 値が最も高くなりました。
表 2. RMSD速度(m・s-1) Catapult デバイスと Vicon 運動解析システムの間。
| N | 平均 | 中央値 | IQR | ||
| 全て | 308 | 0.19 | 0.14 | 0.11 – 0.21 | |
| デバイスの場所 | ベスト | 79 | 0.14 | 0.12 | 0.09 – 0.15 |
| 戻る | 77 | 0.20 | 0.15 | 0.12 – 0.22 | |
| フロント | 76 | 0.24 | 0.17 | 0.14 – 0.27 | |
| 左側 | 76 | 0.18 | 0.13 | 0.11 – 0.18 | |
| 移動タイプ | 線形 | 140 | 0.17 | 0.12 | 0.09 – 0.18 |
| COD45 | 44 | 0.27 | 0.22 | 0.14 – 0.32 | |
| COD90 | 43 | 0.18 | 0.15 | 0.11 – 0.20 | |
| COD180 | 48 | 0.18 | 0.14 | 0.13 – 0.17 | |
| 回路 | 33 | 0.22 | 0.18 | 0.17 – 0.24 |
表3. RMSD加速度(m・s-2) Catapult デバイスと Vicon 運動解析システムの間。
| N | 平均 | 中央値 | IQR | ||
| 全て | 308 | 0.79 | 0.76 | 0.64 – 0.91 | |
| デバイスの場所 | ベスト | 79 | 0.75 | 0.74 | 0.62 – 0.81 |
| 戻る | 77 | 0.77 | 0.76 | 0.60 – 0.91 | |
| フロント | 76 | 0.85 | 0.83 | 0.66 – 0.97 | |
| 左側 | 76 | 0.79 | 0.79 | 0.65 – 0.88 | |
| 移動タイプ | 線形 | 140 | 0.69 | 0.73 | 0.60 – 0.81 |
| COD45 | 44 | 0.67 | 0.67 | 0.48 – 0.87 | |
| COD90 | 43 | 0.75 | 0.74 | 0.66 – 0.85 | |
| COD180 | 48 | 1.24 | 1.25 | 1.16 – 1.32 | |
| 回路 | 33 | 0.77 | 0.80 | 0.73 – 0.86 |
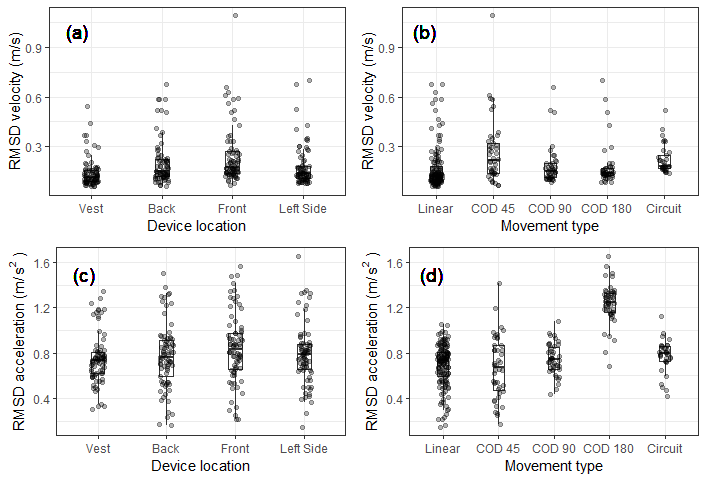
図2. 各トライアルの RMSD 速度 (1 行目) と加速度 (2 行目) の結果。デバイスの位置 (1 列目) と動作タイプ (2 列目) によって階層化されています。
表4 Vector T7 および Vicon 位置追跡データから導出されたサンプル間距離の MAD を示します。すべてのトライアルの平均差は 0.39 m で、腰の前部に装着したデバイスとサーキット動作トライアルでは差がより大きくなりました。
表4. カタパルト デバイスと Vicon 運動解析システム間のサンプル間距離 (m) の MAD。
| N | 平均 | 中央値 | IQR | ||
| 全て | 308 | 0.04 | 0.03 | 0.02 – 0.05 | |
| デバイスの場所 | ベスト | 79 | 0.03 | 0.03 | 0.02 – 0.04 |
| 戻る | 77 | 0.04 | 0.03 | 0.02 – 0.04 | |
| フロント | 76 | 0.05 | 0.04 | 0.03 – 0.06 | |
| 左側 | 76 | 0.04 | 0.03 | 0.03 – 0.04 | |
| 移動タイプ | 線形 | 140 | 0.03 | 0.03 | 0.02 – 0.04 |
| COD45 | 44 | 0.04 | 0.04 | 0.03 – 0.05 | |
| COD90 | 43 | 0.04 | 0.03 | 0.03 – 0.04 | |
| COD180 | 48 | 0.04 | 0.03 | 0.03 – 0.04 | |
| 回路 | 33 | 0.07 | 0.06 | 0.05 – 0.09 |
静的トライアル
すべての固定デバイスの中央値および IQR サンプル間距離はゼロでした (表5)、ほとんどのタイムステップでデバイスの x 座標または y 座標が変更されなかったことを示しています。
ただし、デバイスは位置の変化を記録し、サンプル間の平均距離は約 1 ~ 2 mm でした。 10 分間にわたって強い方向の偏りはなく、デバイスの最終位置は初期位置に非常に近くなりました (最終変位は数センチメートル程度)。
メーカーによる累積距離 (「オドメーター」変数) の計算に含まれる独自のデータ処理とフィルタリングにより、位置の小さな変化を補正することができ、0.02 m 未満の合計距離が返されました。
表5. 静的トライアルの結果 (3 台のデバイスを 10 分間静止させた)。
| x、y 位置から導出 | |||||
| 連続するサンプル間の距離 (m) | 最終サンプルの変位 (m) | 最終サンプルの走行距離計 (m) | |||
| デバイス | 平均 | 中央値 | IQR | ||
| 全て | 0.001898 | 0 | 0 – 0 | ||
| 1 | 0.001644 | 0 | 0 – 0 | (-0.02, -0.05) | 0.02 |
| 2 | 0.001548 | 0 | 0 – 0 | (-0.03, -0.06) | 0.00 |
| 3 | 0.002502 | 0 | 0 – 0 | (-0.06, -0.05) | 0.01 |
→ ここをクリックして、この Vector T7 ホワイト ペーパーをダウンロードしてください.
5. 概要
- ベクター T7 デバイスは、高速の加速、減速、方向転換を伴う移動試行中の速度と加速度の測定値の RMSD が低く、距離の測定値の MAD が低かった。
- ベクター T7 デバイスは、RMSD がわずかに高かった 180 度の方向転換を除いて、すべての動作トライアルの加速度の測定において同様に低い RMSD を示しました。これはおそらく、この試行での加速/減速の割合が高い動きが原因であり、速度の変化率が増加するにつれて誤差が増加することを示唆しています。ただし、この誤差は依然として低いと考えられます (平均 RMSD は 1.24)。
- ベストの装着では速度、加速度、距離の測定誤差が最も低くなり、腰の前部にデバイスを装着すると誤差が最も大きくなりました。デバイスの配置に関係なく、すべての場所ですべての測定値にわたって誤差が低く、すべての RMSD ≤ 0.85 でした。
- Vector T7 デバイスの静止時の位置安定性は高く、サンプル間の平均距離は約 1 ~ 2 mm でした。
- 誤差が低いということは、ClearSky と組み合わせて使用される Vector T7 デバイスが、線形最大努力や方向転換動作など、チーム スポーツ固有のタスク中に速度、加速度、距離の有効な測定値を提供することを示唆しています。
→ ここをクリックして、この Vector T7 ホワイト ペーパーをダウンロードしてください.
6. 参考文献
- JJ マローン、R. ラベル、MC ヴァーリー、AJ クーツ (2017)。ブラックボックスを開梱する: スポーツで GPS デバイスを使用する場合のアプリケーションと考慮事項。 スポーツ生理学とパフォーマンスの国際ジャーナル、12(s2)、S2−18。
- Linke, D.、Link, D.、Lames, M. (2018)。現場条件下での電子性能および追跡システム EPTS の検証。 プロスワン、13(7)、e0199519。
- Linke, D.、Link, D.、Lames, M. (2020)。 TRACAB の光学ビデオ追跡システムのサッカー特有の有効性。 プロスワン、15(3)、e0230179。
- Luteberget, LS、Spencer, M.、Gilgien, M. (2018)。屋内条件におけるチームスポーツ特有の訓練における Catapult ClearSky T6 ローカル測位システムの有効性。 生理学におけるフロンティア, 9, 115.
- セルピエロ、FR、ホプキンス、WG、バーンズ、S.、タヴルー、J.、ダシー、GM、オーギー、RJ、およびボール, K. (2018)。屋内スポーツにおける運動量を測定するための超広帯域ローカル測位システムの有効性。 スポーツ科学ジャーナル, 36(15), 1727-1733.
- RW ホッダー、KA ボール、FR セルピエロ (2020)。ユニット間距離を測定するための Catapult ClearSky T6 ローカル測位システムの基準の有効性。 センサー, 20(13), 3693.
- Rコアチーム(2021)。 R: 統計コンピューティングのための言語および環境。 R 統計コンピューティング財団、オーストリア、ウィーン。 URL https://www.R-project.org/
- ヴァン・ボクテル、GJM、ラボワシエール、R.、ウィルヘルム、HD(2021)。 gsignal: 信号処理。 URL: https://github.com/gjmvanboxtel/gsignal